工作原理、十字模式与X字模式
工作原理
四轴飞行器,又名四旋翼飞行器、四旋翼直升机。
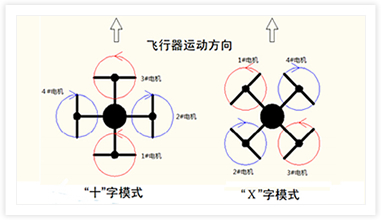
顾名思义,是一种具备4个螺旋桨的飞行器,与直升机类似,可以完成空中悬停、飞行的动作。传统直升机会用一个主桨来产生推力,用一个尾桨来抵消主桨产生的扭矩(即锁尾),而四旋翼飞行器对角螺旋桨采用正反桨设计,从而不需要额外的机构进行“锁尾”。4个螺旋桨呈十字形对称分布,1和2号桨逆时针转动,而3和4号桨顺时针转动,但4个螺旋桨产生的推力相同时,两组正反桨对机身所施加的反扭矩两两抵消,使得绕垂直方向旋转的反扭矩平衡,从而确保了航向的稳定。
根据飞行器自定义的首尾方向,可以将四旋翼飞行器分为十字模式和X字模式两种。
十字模式意味着首尾的方向会指向某个螺旋桨,而X字模式则是指首尾方向指向两个螺旋桨中间。
十字模式
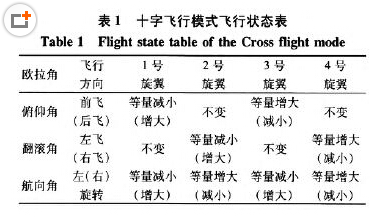
以十字飞行模式为例,l号旋翼为头,1、3号旋翼逆时针旋转,2、4号旋翼顺时针旋转,如图所示:
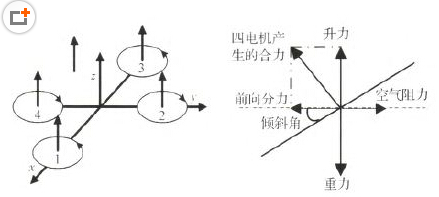
参照飞行状态表1变化电机转速,由于四个电机转速不同,使其与水平面倾斜一定角度,如图l所示。四个电机产生的合力分解为向上的升力与前向分力。当重力与升力相等时,前向分力驱动四轴飞行器向倾斜角度的方向水平飞行。空间三轴角度欧拉角分为仰俯角、横滚角、航向角:倾斜角是仰俯角时,向前、向后飞行;倾斜角是横滚角时,向左、向右飞行;而倾斜航向角时,向左、右旋转运动,左(右)旋转是由于顺时针两电机产生的反扭矩之和与逆时针两电机产生的反扭矩之和不等,即不能相互抵消,机身便在反扭矩作用下绕z轴自旋转。
X字模式
X字模式的四轴飞行器的动力学模型如图所示。飞行器载体坐标系,原点固定于飞行器的重心,以坐标轴,分别指向飞行器的前( 横滚轴)右( 俯仰轴) 和下( 偏航轴) 方向选取导航坐标系为参考坐标系,分别指向北东和当地垂线向下方向 和 分别代表飞行器受到转矩和升力图 ,四旋翼飞行器动力学模型四旋翼飞行器产生基本动作的原理为: 电机1和3逆时针旋转驱动两个反桨产生升力,电机2和4顺时针旋转驱动两个正桨产生升力。反向旋转的两组电机和桨使其各自对机身产生的转矩相互抵消,保证4个电机转速一致时机身不发生转动。
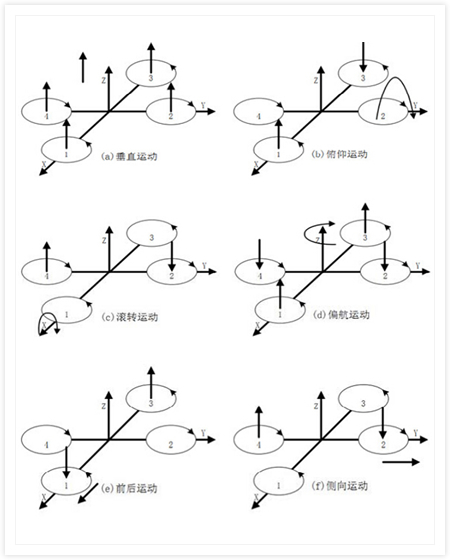
机1和4转速减小(增大) 同时电机2和3转速增大(减小), 产生向前(后)方向的运动。电机1和2转速减小(增大) , 同时电机3和4转速增大(减小) ,产生向左(右)方向的运动。4个电机转速同时增大(减小)产生向上(向下)的运动。 对角线的电机一组转速增大,另一组转速减小产生自身旋转运动。
十字模式和X字模式的优劣
对于姿态测量和控制来说,两种方式差别不大。
十字模式,原理比较简单明了,调试容易,飞行稳定,适合刚接触四轴飞行器的初学者。
但是,市面上大部分带云台的四轴飞行器,为了使视线不被桨叶遮挡,一般采用X模式。而且飞行更加稳定灵活。
Littlebuzz 2.0采用了X字模式。
例如:大疆精灵4就是采用X字模式的航拍级别四轴飞行器

初学者关于十字模式和X字模式的误识
部分初学者误认为,传感器摆放的位置和角度直接决定了四轴飞行模式为十字模式还是X字模式。
比如,常见的MPU-6050在四轴飞行器上摆放的角度有以下两种情况:
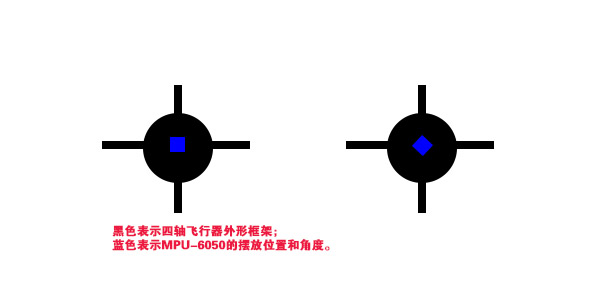
然而并不是,四轴飞行模式可以通过算法姿态换算来切换成十字模式或X字模式。
核心代码如下:
#define HALF_SQRT_2 0.70710678118654757f
tmp = HALF_SQRT_2 * (x - y);
y = HALF_SQRT_2 * (x + y);
x = tmp;
