Littlebuzz硬件原理讲解
作者:喵大
Littlebuzz飞行器平台
Littlebuzz的特点:
- 小而轻。不带电池的裸机重量:约30克;带350mAh锂电池的重量:约38克,电机轴对角尺寸:约100mm;
- 飞行时间:约4分钟(采用标准350mAh锂电池),约7分钟(采用标准600mAh锂电池)
- (STC)IAP15W4K61S4(1T 8051) @ 20MHz 处理器(61Kb flash, 4kb RAM),极度适合只会51单片机的初学者上手学习。
- Invensense MPU-6050 6轴陀螺仪、加速度计:;
- nRF24L01+模块。不带PA,遥控距离约60m,带PA,遥控距离更长,具体未测试;
- 标准micro-USB接口。用于烧录程序和对350mAh锂电池充电,充电时间40分钟。
Littlebuzz原理图设计
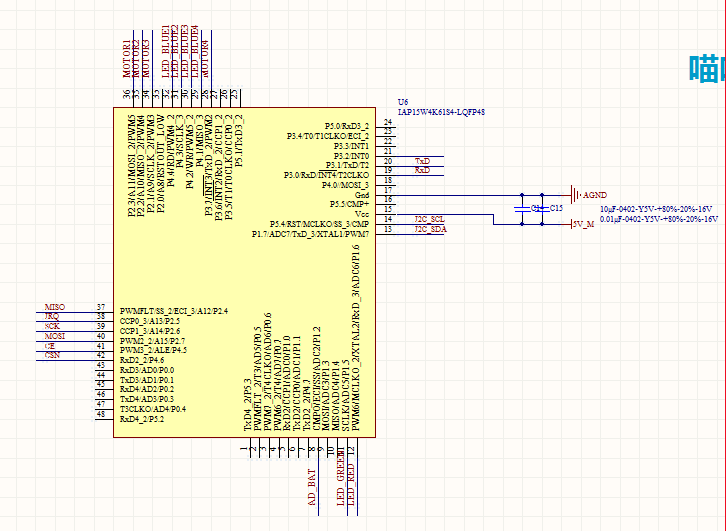
控制芯片最小系统
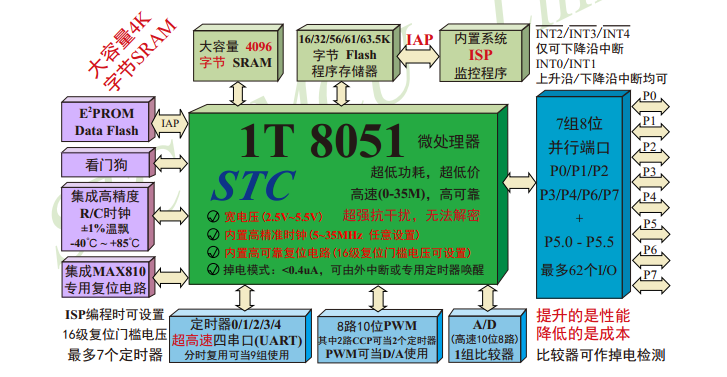
控制芯片选择宏晶公司IAP15W4K61S4,它体积小(LQFP48),工作电压宽(2.5V-5.5V ),具有丰富的外设模块,能满足制作微型四轴飞行器的要求。
它的外设包括:
- PWM :6路15位硬件PWM+2路CCP的16位;
- UART:4组;
- ADC:8路10位高速ADC;
- 定时器:共7个定时器,5个16位可重装载定时器/计数器,2路CCP还可再实现2个定时器;
- IO口:最多提供62个GPIO;
- 内部存储器资源包括: 61kb Flash,4kb SRAM。
此外,IAP15W4K61S4内部还集成了时钟电路、内部高可靠复位电路以及看门狗电路等。下图显示该单片机的内部资源情况。
IAP15W4K61S4单片机内置时钟和复位电路,单片机的最小系统电路非常简洁。
动力电源
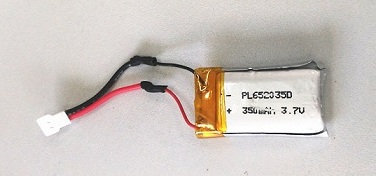
电池使用的是锂电池(锂离子聚合物电池),是目前流行的航模动力电池。但锂电池必须按照规定使用,过冲、过放都会产生安全隐患。航模动力电池具有最高的电能/质量比和最大的放电电流,是比较合适的选择。
航模动力电池,常见有1s 3.7v、2s 7.4v、3s 11.1v锂电池。“s”代表串联,“2s”即为两块3.7v锂电池串联,得到7.4v。
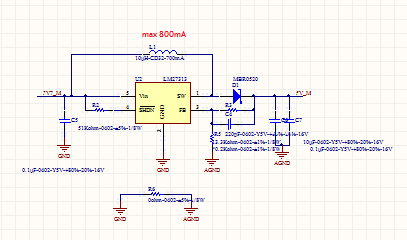
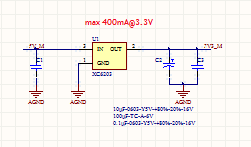
系统电源
Littlebuzz采用3.7v 350mAh锂电池。电池电压为3.7V,但系统选用芯片要求是3.3v和5v供电。3.7v无法满足所有电压需求。所以,Littlebuzz采取先用DCDC将3.7V升至5V,再用LDO降至3.3V,以满足系统电压使用要求。
姿态传感器
Littlebuzz的姿态传感器使用的Invensens公司的MPU-6050单芯片六轴传感器,它包含了一个三轴陀螺仪和一个三轴加速度计。MPU-6050使用IIC通信,可以外挂磁力计HMC5883L,但微型四轴飞行器体积过小,电机运转起来对磁力计影响较大,使磁力计形同虚设,所以Littlebuzz没有加入磁力计。

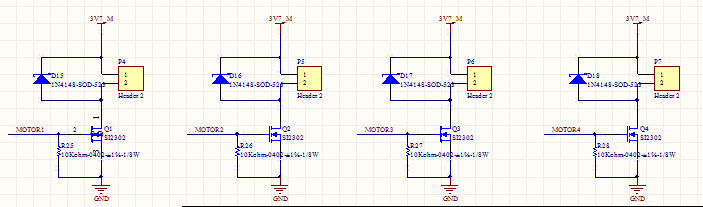
驱动电路
Littlebuzz选用MOS管来驱动电机,通过PWM控制电机转速。该MOS管的驱动电路可达3A,完全满足微型四轴飞行器的设计需求。值得注意的是,MOS管要接电阻下拉,防止电机在上电时误转。
USB-Serial协议转换
几乎每个人都有手机数据线,所以,出于节省环保和方便使用的目的,Littlebuzz上集成了USB-Serial芯片CP2102和Micro-USB端子。实现一键下载,随走随下的功能。


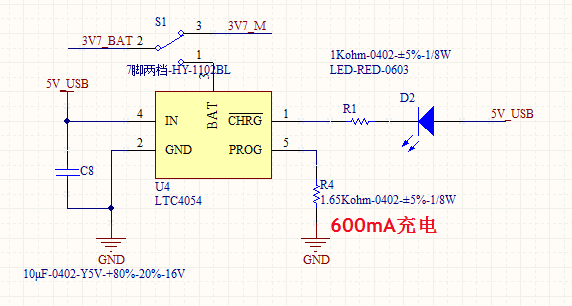
充电管理
难道玩一下四轴还要去额外买充电器?大麻烦了。于是,Littlebuzz集成了LTC4054单锂电池充电芯片。需要充电时,把电源开关拨至OFF/CHA端,然后把手机充电线线插入Micro-USB即可进行充电。
LTC4054外围电路简单,一个电阻R4作为充电限流电阻,充电电流最大可达600mA,充电电流计算公式:IBAT =(VPROG /RPROG)*1000。R1作为充电指示灯的限流电阻,选择几百欧姆就行了。当充电进行中,引脚CHRG常低,充电结束时,CHRG拉高。对应的状态就是:充电时,LED灯常亮,充电完成,LED 灯灭。
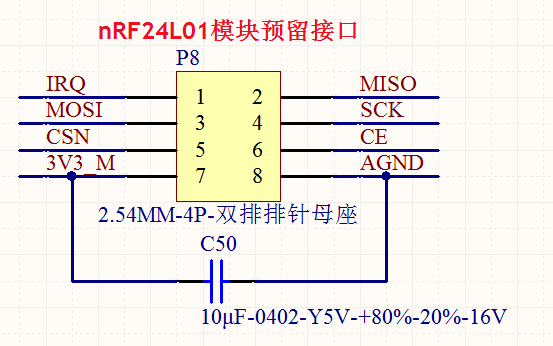
2.4G 通信
2.4G通信芯片选择大家熟悉的芯片-nRF24L01。
Littlebuzz体积紧凑,nRF24L01芯片不集成到PCB上,而是选用现成的无线模块,其接口电路和无线模块实物分别如图所示。