虚拟示波器Serial Digital Scope
author:Songyibiao
我们的上位机尚在调试当中。所以,暂用一款虚拟示波器Serial Digital Scope V2作为我们的调试工具,可以用于观察波形。
下面为大家讲解如何使用虚拟示波器Serial Digital Scope V2。
驱动安装
- 安装串口驱动。Littlebuzz 飞行器和遥控器板载CP2102,选择对应的驱动,傻瓜式安装,一路next到底即完成安装。
- 准备一根micro USB 数据线,即常见的手机数据线。
- 完成上面两个步骤后,通过数据线连接到电脑上。电脑会自动识别设备安装驱动(要先完成第一步预安装喔),在我的电脑–设备管理器–端口处找到相关串口显示。Serial Digital Scope V2原版软件需要收费,只能免费使用COM1和9600波特率。如果串口不是COM1,点击串口驱动,右键-属性-端口设置-高级-COM端口号修改为COM1。破解版可以随意调整COM口和波特率。我们使用破解版。
- 通过上面步骤,我们的硬件通信已经OK了。接下来就是调用API,让单片机来发送数据给上位机就可以了。
调用API
资料包里有编写好的API,你只要加入到你的软件里面,调用即可。
如果是直接使用我们喵呜实验室的代码,则已经包含API,不需要重复调用。
把相应的API加入工程之后,需要修改void OutPut_Data(void)函数,只需要改动一处,改成对应的代码,认真看下面代码,在需要改动的地方,我标注了注释。
void OutPut_Data(void)
{
int temp[4] = {0};
unsigned int temp1[4] = {0};
unsigned char databuf[10] = {0};
unsigned char I;
unsigned short CRC16 = 0;
for(i=0;i<4;i++)
{
temp[i] = (int)OutData[i];
temp1[i] = (unsigned int)temp[i];
}
for(i=0;i<4;i++)
{
databuf[i*2] = (unsigned char)(temp1[i]%256);
databuf[i*2+1] = (unsigned char)(temp1[i]/256);
}
CRC16 = CRC_CHECK(databuf,8);
databuf[8] = CRC16%256;
databuf[9] = CRC16/256;
for(i=0;i<10;i++)
UART1SendByte(databuf[i]);//需要修改的地方,改成你所用单片机串口的一字节发送函数
}
Serial Digital Scope V2支持四个通道。需要发送的4个数据分别写入到数组OutData[]即可,你想发送什么数据就自己成对应的,接着调用OutPut_Data()函数完成发送。
例如:
OutData[0] = g_fCarAngle;//发送数据融合后角度
OutData[1] = g_fGravityAngle;//发送加速度计角度
OutData[2] = g_fGyroAngleSpeed;//发送陀螺仪角速度
OutData[3] = 90;
OutPut_Data();
喵呜实验室的代码里面,在ISR.C里面有调用了上面代码,并使用预编译,在需要调用API发送数据时,只需要把#if 0改为#if 1就使能调用啦。
如果不清楚什么是预编译的话,那就要打你的屁屁了,这可是C语言的基础啊。
熟悉界面
来熟悉一下Serial Digital Scope V2的界面:
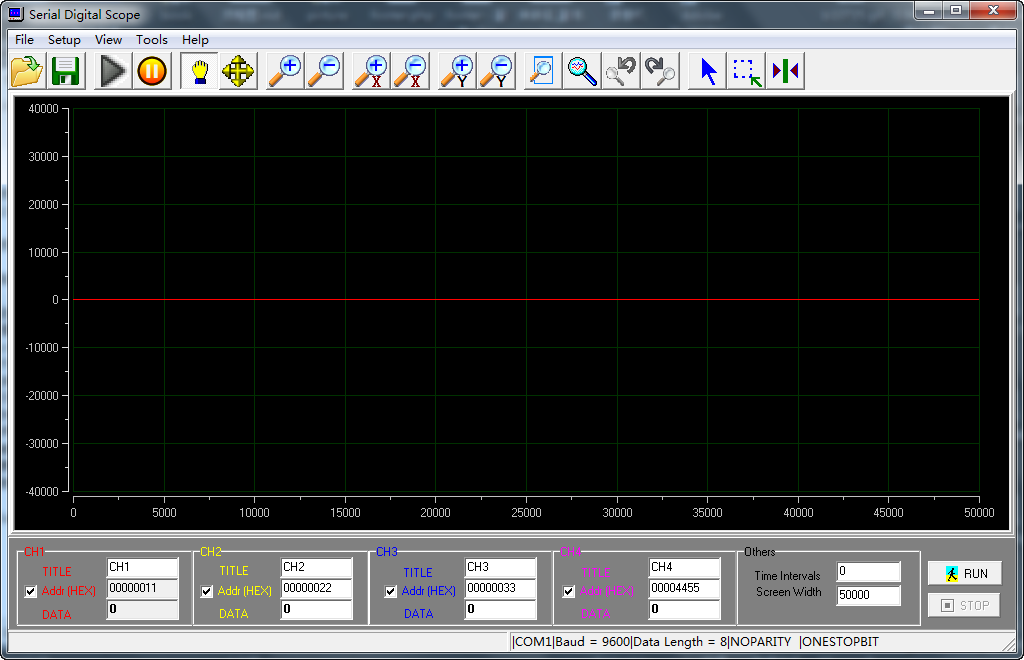
上面一排工具栏的功能依次为:

打开文件夹,保存文件,恢复,暂停,移动,调焦,放大,缩小,X轴调节,Y轴调节,缩小到合适图像,缩放到最大等功能。

一共四个通道。想使能相应的通道,让其数据表示出来,就打上勾。
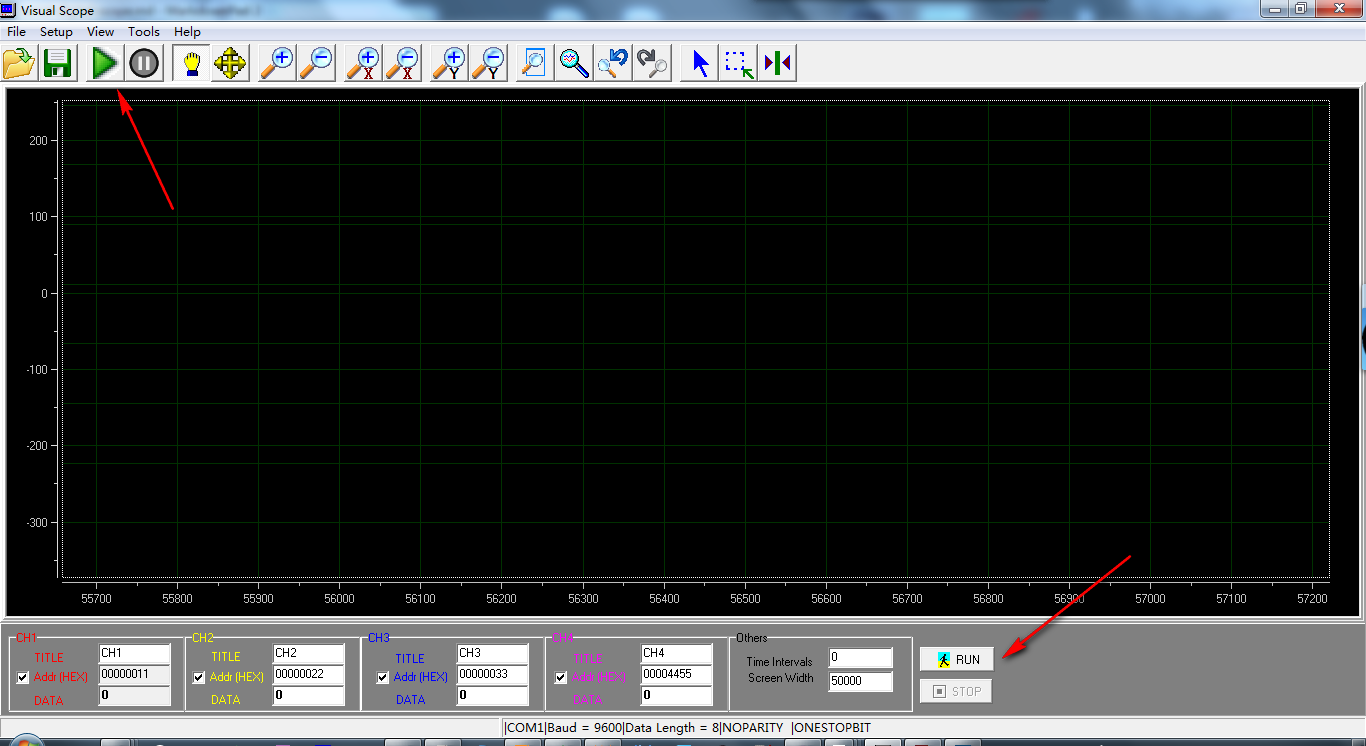
在连接好硬件和调用API后,点击RUN即可显示数据。
