MWbalancedSTC15(第二版)硬件原理讲解
作者:Songyimiao

硬件参数
以下列举是喵呜实验室MWbalancedSTC15(第二版)的硬件参数:
- 控制芯片:IAP15W4K61S4【STC增强型51单片机,跟STC89C51一样简单易用】
- 姿态传感器:MPU6050(三轴加速度传感器+三轴陀螺仪)
- 无线通信模块:蓝牙SPP-C
- 有线通信芯片:CP2102
- 电机驱动芯片:TB6612FNG
- 外部接口:Mirco-USB
- 电机:直流减速电机
- 车轮:65mm
- 电池:定制的2000mAh大电流锂电池
MWbalanced原理图设计简介
单片机最小系统
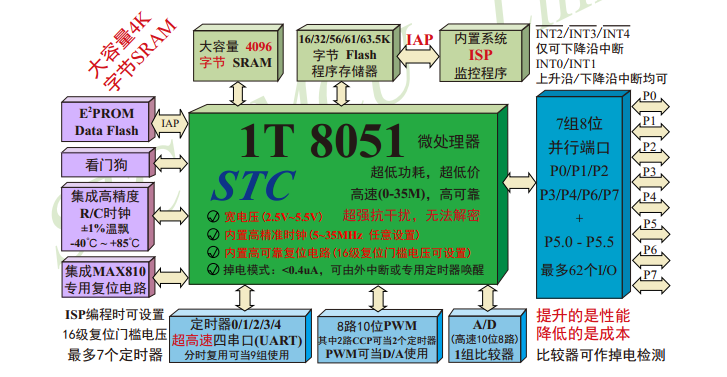
单片机选择宏晶公司IAP15W4K61S4,它体积小(LQFP48),工作电压宽(2.5V-5.5V ),具有丰富的外设模块,适合制作两轮自平衡小车。
它的主要外设包括:
- PWM :6路15位硬件PWM+2路CCP的16位;
- UART:4组;
- ADC:8路10位高速ADC;
- 定时器:共7个定时器,5个16位可重装载定时器/计数器,2路CCP还可再实现2个定时器;
- IO口:最多提供62个GPIO;
- 内部存储器资源包括: 61k程序Flash,4kSRAM。
此外,IAP15W4K61S4内部还集成了时钟电路、内部高可靠复位电路以及看门狗电路等。下图显示该单片机的内部资源情况。
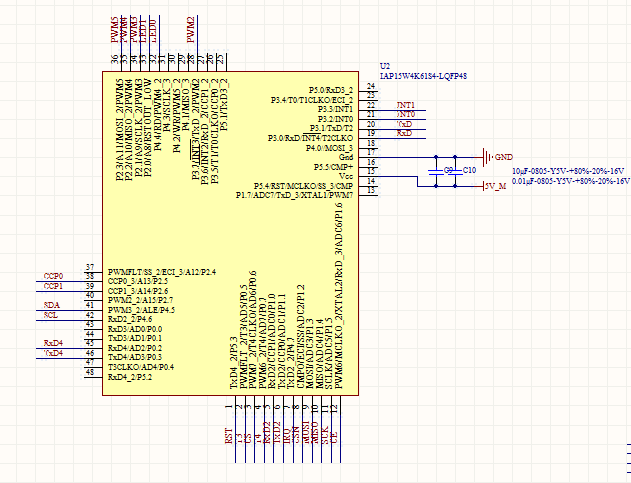
由于该单片机内已经包含了时钟和复位电路,所以单片机的最小系统电路非常简洁。
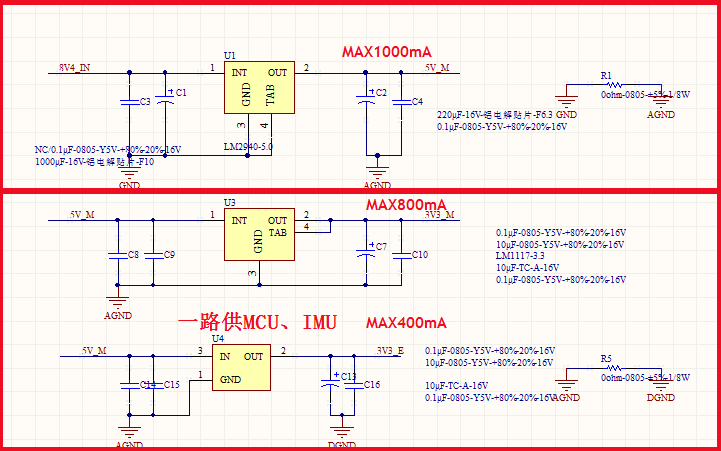
系统电源
系统采用的动力源是定制的大电流锂电池,电池组充满电压达8.4V。而系统的部分芯片需要5V供电,部分芯片需要3.3V供电,所以需要电源转换电路。MWbalancedSTC15采用的是芯片LM2940-5.0和ASM1117-3.3。
姿态传感器
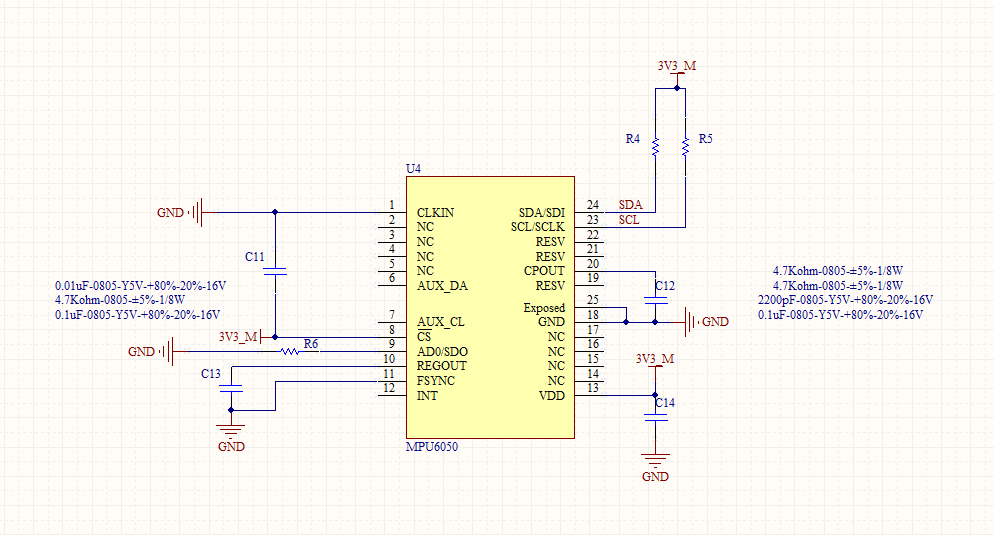
MWbalanced采用的是当下很火的的MPU6050陀螺仪加速度计一体芯片,成本不超过15元,对两轮自平衡小车来说,它的精度和性能绰绰有余了,MPU6050在这个价位里面几乎是占有绝对的性价比优势。首先,它将陀螺仪和加速计封装在一起,通过IIC总线给出六个维度的ADC值;其次,芯片本身提供一个IIC从接口,供用户接第三方的IIC器件,一般选择是接一个电子罗盘,如HMC5883L,构成一个9轴的输出的姿态模组。现在MPU9150已经丧心病狂的把电子罗盘功能也整合在片上了,但是要买60+元。最后,这颗芯片内部集成了一个DMP(Digital Motion Processor)处理器,能直接硬件解算四元数,这让姿态解算不再是难事,跳过这个障碍后就连大妈都能做两轮自平衡小车了。
电机驱动电路
由于小车需要两组电机,因此也需要两组H桥驱动电路。我们选用电机驱动芯片 TB6612FNG组成了电机驱动电路。一块TB6612FNG驱动芯片内置了两组H桥电路。
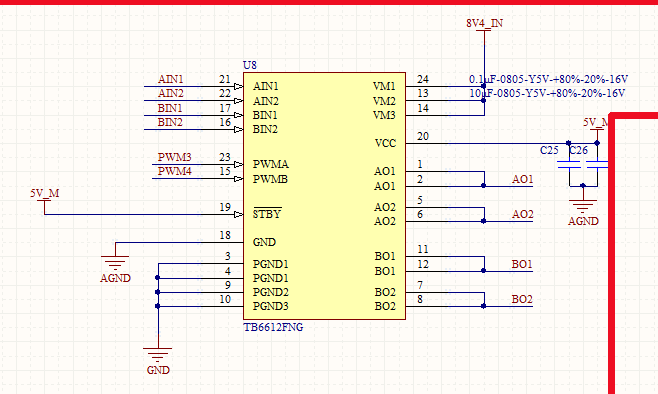
每一路电机为了能够实现控制速度和正反转,都分别需要一路PWM信号和两路GPIO。
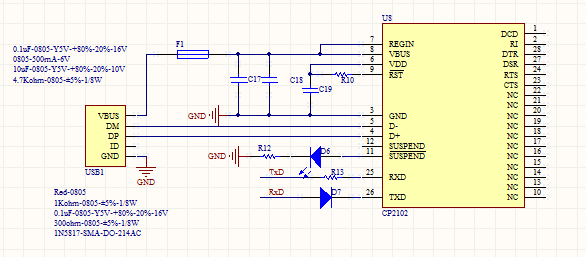
USB-Serial协议转换
因为考虑到不是每个同学手上都有USB-TTL下载模块的,而且市面上的USB-TTL模块质量参差不齐,质量差的还会导致电脑蓝屏,于是,MWbalancd板载USB-TTL下载电路,通过一根安卓手机标配的MicroUSB线,就可以轻易简单地进行固件更新和调试参数。如此简单的操作步骤,想来随便从大街拉个路人过来应该都可以完成。
蓝牙透传模块
为了让小车能跟上智能机泛滥的步伐,同时也是为了增加它的适应性和降低成本的考虑,我们在原来的基础上增加了蓝牙透传SPP-C模块,硬件焊盘上兼容蓝牙2.1技术。
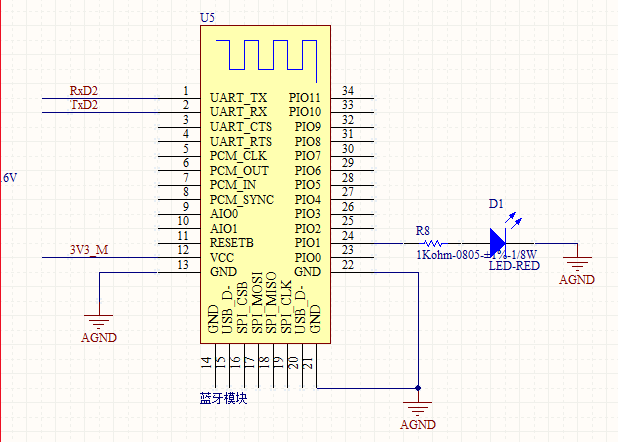
蓝牙协议是很复杂的,要想去接触并试图一步一步的写出来,在我现有的时间下,几乎不太可能了。而将蓝牙透明传输成串口,这就很好的将小车与安卓设备对接了,可以直接在安卓设备上面开发遥控app或者上位机。这想想也有点小激动呢,于是,我们真的这么干了,也成功了。
