两轮自平衡小车需要多少个维度数据?
作者:Songyimiao
和四轴飞行器在三维姿态上都需要检测不一样,因为两轮自平衡小车有两个轮子着地,车体只会在轮子滚动的方向上发生倾斜。控制轮子转动,抵消在一个维度上倾斜的趋势便可以保持车体平衡了。一言蔽之,测出车体沿着轮子滚动方向的维度变化即可。如图1。
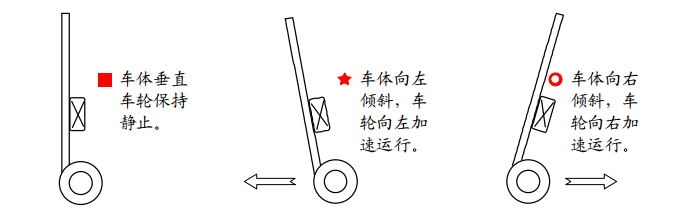
图1
在传感器集成度还没那么高的时代,一个陀螺仪都很贵。DIY一辆两轮自平衡小车只需要用到一个单轴加速度传感器、一个单轴陀螺仪,没有什么特殊要求的时候,人们就不会去买三个单轴加速度传感器和三个单轴陀螺仪来DIY一辆平衡小车,除非有的人人傻钱多呵呵呵。
随着科技的进步,传感器集成度越来越高了,以至于出现了全球首例整合性6轴运动处理组件的MPU-6050。也就是说MPU-6050已经疯狂到把三个单轴加速度传感器和三个单轴陀螺仪整合到一块比指甲盖还小的封装里的地步了(如图2),而且还卖得便宜(不用10元)。对于这种丧心病狂的科技进步,我只想说来得更猛烈些吧。
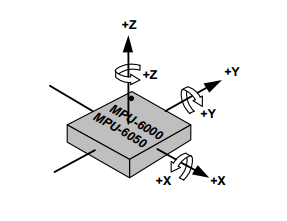
图2
所以,在MPU-6050在低成本DIY行列中泛滥的时期,如果你也幸运地在使用这款芯片在DIY两轮自平衡小车,那么你只需要读取车体上沿轮子转动方向的姿态数据就可以了。
