整车设计思路
author:Songyibiao
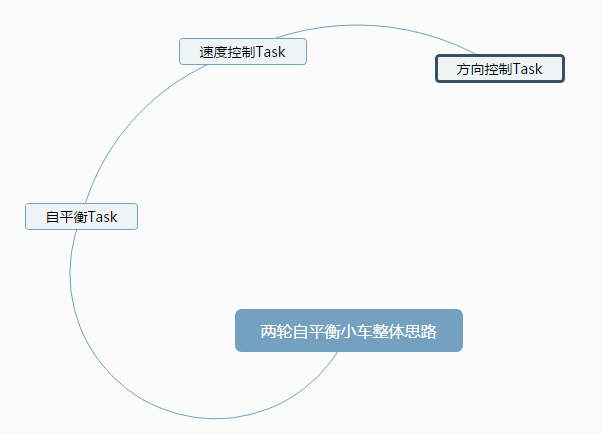
两轮自平衡小车在行走时,主要完成三个控制任务,一是小车的自平衡控制;二是小车的方向控制;三是小车的速度控制。在设计Mwbalanced时,为了增加小车的机械稳定性,主要采取了降低重心和减小小车质量的方法,比如把小车的电池尽量的放在靠下的地方,在安装扩展支架时,例如红外循迹,尽量从下面伸出。与此同时对这三个任务进行解耦控制,可以简化程序的控制方法。在编写控制程序时,我们采用了Small RTOS51实时操作系统,采用实时操作系统的特点是,在一个极小的时间段内,小车可以同时运行多个任务,相当于有几个CPU在同时进行运算,每个任务之间只负责好自己的控制目标。