蓝牙遥控
本小节教你如何使用「喵呜手机端」、「喵呜手机端简易版」(曾用名「平衡小车通用控制」)两款 APP,并对其中的功能进行说明。
视频版教程 (点击文字可转跳到视频网站)
文字版教程
我们在上一节中已经安装好了小车,并且在安卓手机中安装了「喵呜手机端」 和「喵呜手机端简易版」两款 APP。
喵呜手机端
我们先对专业级 APP ——「喵呜手机端」进行说明。「喵呜手机端」有 5 个界面,下面分别对这 5 个界面进行说明。5 个界面可以左右滑动屏幕进行切换。
重力感应界面
手机带有陀螺仪和加速度计才能使用重力感应功能。部分低端手机可能为了节省成本,不带有陀螺仪和加速度计,将无法使用重力感应功能。

初次打开 APP 时,你先看到的会是重力感应界面。界面上方有三个参数,有 Pitch、Roll、滤波器系数。其中,
- Pitch:代表手机前后倾斜的角度
- Roll:代表手机左右倾斜的角度
- 滤波器系数:忽略
在重力感应界面,按住重力感应块,通过倾斜手机的角度就能控制小车的方向、速度。手机与地面平衡状态为 0 度。手机前后倾斜时为控制小车前进、后退,倾斜角度越大(即 Pitch 越大),前进、后退的速度越大。手机左右倾斜则为控制小车左转、右转,倾斜角度越大(即 Roll 越大),左转或右转的角度越大,当手机纯粹向左或向右倾斜时(此时 Pitch 为 0,Roll 不为 0),小车旋转角度为 360 度,即原地自旋。
摇杆控制
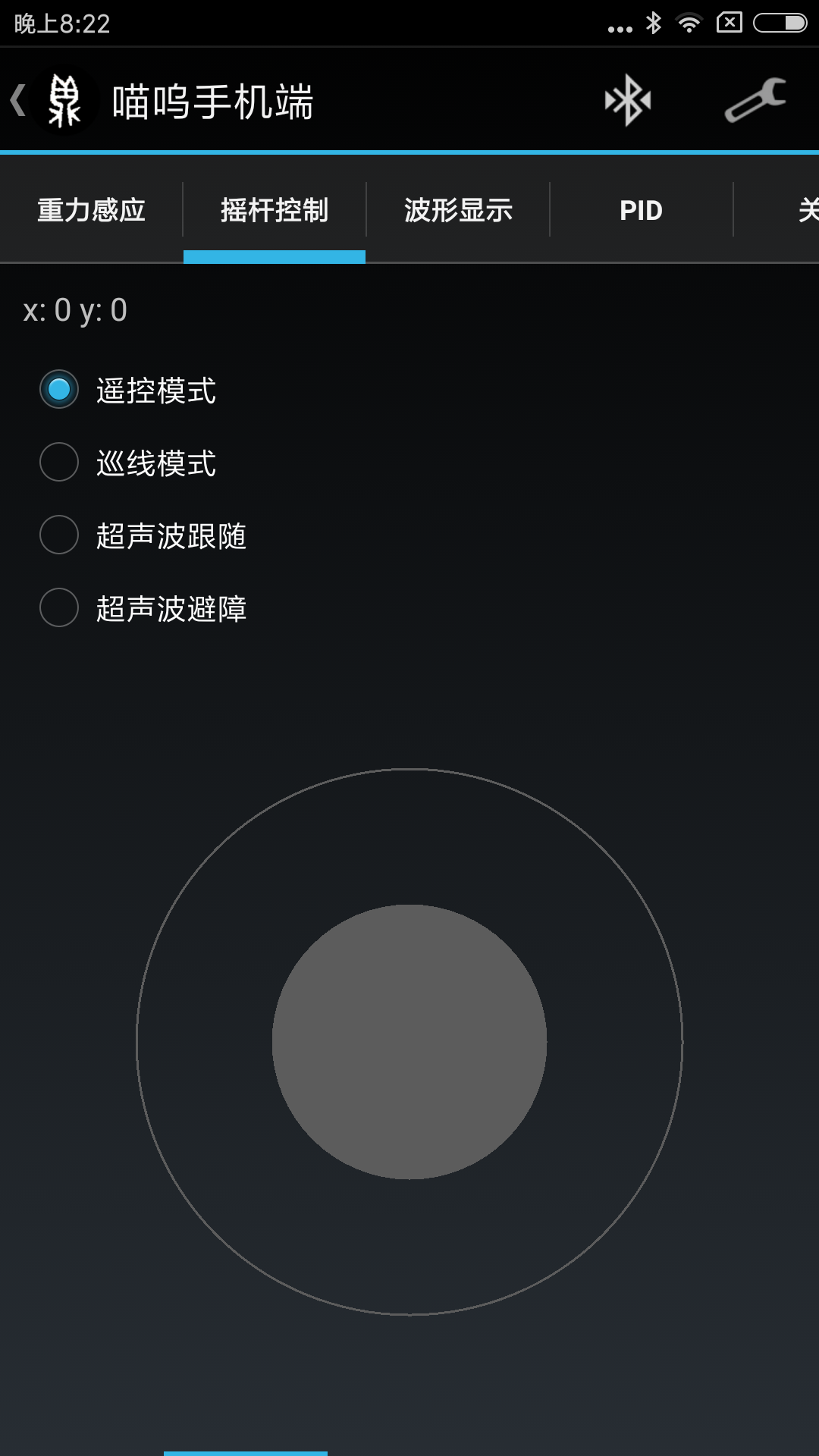
往左滑动,切换到摇杆控制界面。界面上方有 x、y 两个参数,x 代表摇杆左右推离中心的距离,y 代表摇杆前后推离中心的距离。紧接着 x、y 参数的下方,有 4 个控制模式可以切换,分别为:
- 遥控模式:只有在遥控模式下,才能使用重力感应和摇杆控制小车。
- 巡线模式:安装红外模块才能生效。在巡线模式下,小车跟随预设的黑线运动。
- 超声波跟随模式:安装超声波模块才能生效。在跟随模式下,小车自动判断与前方障碍物的距离,并通过运动与障碍物保持设定的距离。
- 超声波避障模式:安装超声波模块才能生效。在避障模式下,小车自动判断与前方障碍物的距离,并通过运动避开障碍物。
界面的下方为虚拟摇杆,按住并推动摇杆就能控制小车的方向、速度,松手后摇杆自动回中。摇杆推离中心越远,速度、转向角度就越大。当摇杆水平推至左侧或右侧(此时 y 为 0,x 不为 0),小车的旋转角度为 360 度,即原地自旋。
波形显示
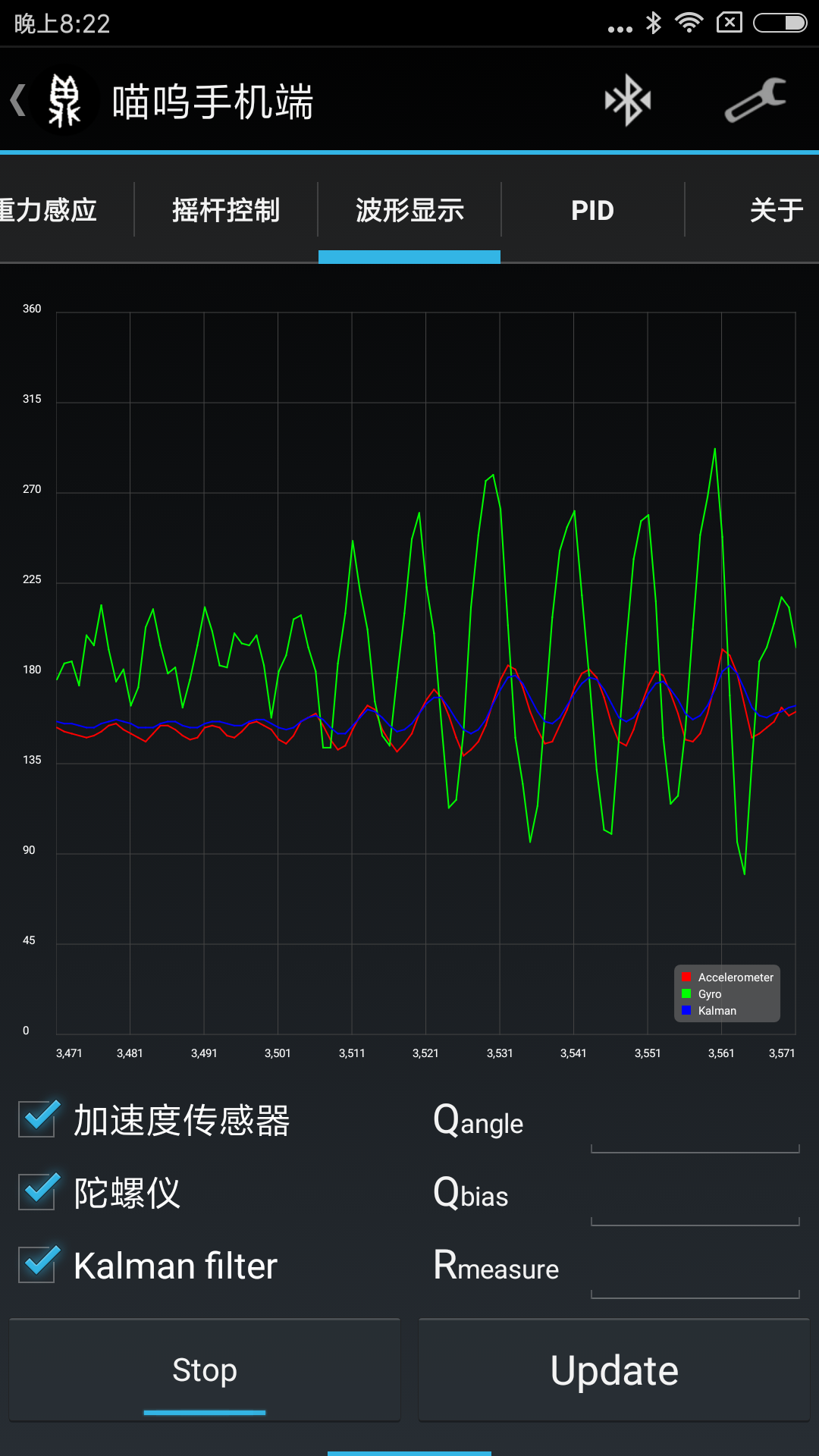
波形显示界面的上方部分为波形显示窗口,下方有 3 个参数可以勾选,分别为:
- 加速度传感器:代表小车里加速度传感器初步经过 atan2 函数计算得到的角度值,未经过数据融合。
- 陀螺仪:代表小车里陀螺仪的数据,我们通常认为陀螺仪的输出就是角速度值。
- Kalman filter:代表加速度传感器和陀螺仪数据融合后得到的角度值,即小车的实时倾斜角度值。
我们通常会全选以上 3 个参数,便于观察小车数据融合后的角度有没有噪声和延迟。
PID

PID 界面上方有 2 个当前参数可以选择:
- 角度环 PID
- 速度环 PID
选择哪个控制环,则显示对应的 PID 参数。当前参数的下方有 P、I、D 3 个参数的显示值,此时显示的小车正在运行的 PID 参数。点击下方的「查询 PID 参数」就能将小车正在运行的 PID 参数显示到手机上。
接着,调节参数有 P、I、D 3 个滑轨可以调节,用于调节 PID 参数。滑动滑轨调节好参数后,点击下方的「更新 PID 参数」就能将滑轨参数实时更新至小车中。
查询 PID 参数:查询小车正在使用的 PID 参数,并将改组参数显示到手机上。
更新 PID 参数:调节滑轨的 PID 参数后,点击「更新 PID 参数」就能将滑轨参数实时更新至小车中,查看运行效果。
恢复默认参数:小车开机时的 PID 参数将被记录下来成为默认参数,如果改动后想恢复默认参数,只要点击恢复「恢复默认参数」就能恢复为开机时的参数。
关于

关于界面有 6 个参数,分别为:
- APP Version:APP 版本
- Firmware Version:小车程序版本
- EEPROM Version:EEPROM 版本
- MCU:小车使用的 MCU 型号
- 电池电量:小车剩余电量
- 运行时间:小车开机后的运行时间
下方为 Start/Stop 按钮。点击按钮,可以实时获得以上 6 个参数数据。
喵呜手机端简易版
「喵呜手机端简易版」(曾用名「平衡小车通用控制」)界面简洁,只有选项和按钮。
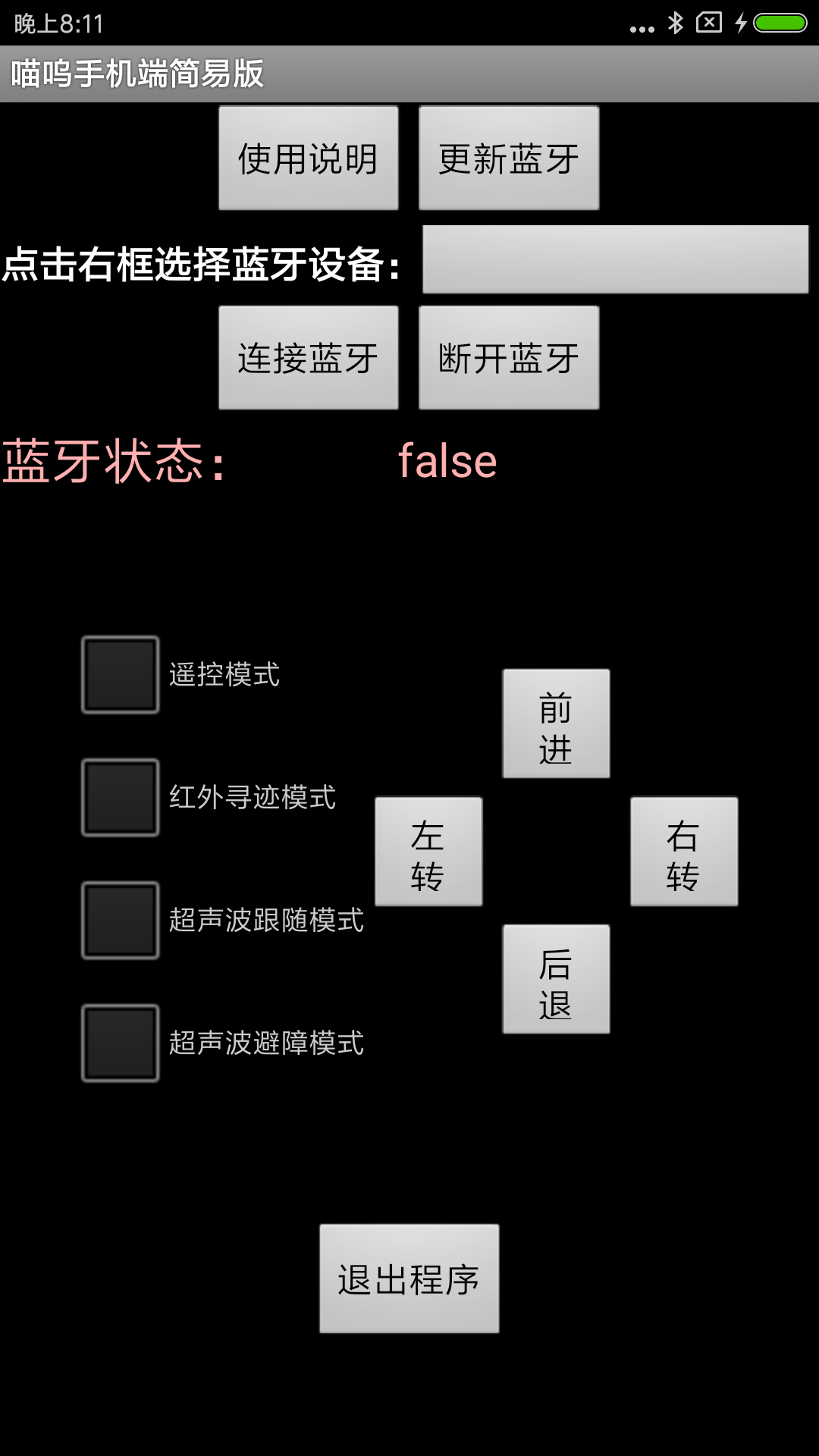
先匹配小车蓝牙,然后点击更新蓝牙按钮,在下方白框中选择蓝牙设备,再点击连接蓝牙按钮,若连接成功,下方蓝牙状态显示为 true。连接未成功,蓝牙状态显示为 false。在 APP 中点击使用说明,能获取操作提示。
界面中间部分有 4 个控制模式可以切换,分别为:
- 遥控模式:只有在遥控模式下,才能使用重力感应和摇杆控制小车。
- 巡线模式:安装红外模块才能生效。在巡线模式下,小车跟随预设的黑线运动。
- 超声波跟随模式:安装超声波模块才能生效。在跟随模式下,小车自动判断与前方障碍物的距离,并通过运动与障碍物保持设定的距离。
- 超声波避障模式:安装超声波模块才能生效。在避障模式下,小车自动判断与前方障碍物的距离,并通过运动避开障碍物。
前进、后退、左转、右转 4 个按钮用于控制小车前进、后退、左转、右转。按住哪个按钮,可以获得对应操作,松开即停止。
点击退出程序按钮,退出 APP。