动力学分析
为了使得同学们能够比较清楚理解其中的物理过程。下面通过对比单摆模型来说明保持车体平衡的控制规律。
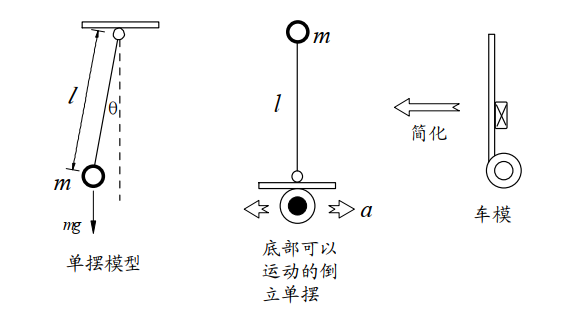
重力场中使用细线悬挂着重物经过简化便形成理想化的单摆模型。直立着的小车可以看成放置在可以左右移动平台上的倒立着的单摆。
对普通的单摆受力分析。
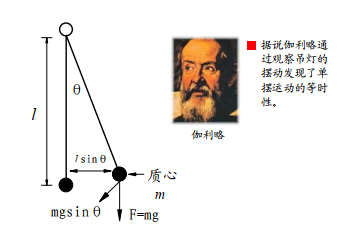
当物体离开垂直的平衡位置之后,便会受到重力与悬线的作用合力,驱动重物回复平衡位置。这个力称之为回复力,其大小为
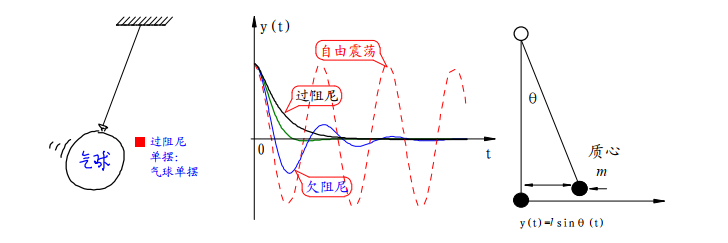
在偏移角度很小的情况下,回复力与偏移的角度之间大小成正比,方向相反。 在此回复力作用下,单摆便进行周期运动。在空气中运动的单摆,由于受到空气的阻尼力, 单摆最终会停止在垂直平衡位置。空气的阻尼力与单摆运动速度成正比,方向相反。阻尼力越大,单摆越会尽快在垂直位置稳定下来。
不同阻尼系数下,单摆的运动曲线也不同。
总结单摆能够稳定在垂直位置的条件有两个:
受到与位移(角度)相反的恢复力;
受到与运动速度(角速度)相反的阻尼力。
如果没有阻尼力,单摆会在垂直位置左右摆动。阻尼力会使得单摆最终停止在垂直位置。阻尼力过小(欠阻尼)会使得单摆在平衡位置附件来回震荡。阻尼力过大(过阻尼)会使得单摆到达平衡位置时间加长,比如气球单摆。因而存在一个临界阻尼系数,使得单摆稳定在平衡位置的时间最短。
为什么倒立摆在垂直位置时,在受到外部扰动的情况下,无法保持稳定呢?我们来分析倒立摆的受力。
倒立摆之所以不能象单摆一样可以稳定在垂直位置,就是因为在它偏离平衡位置的时候,所受到的回复力与位移方向相同,而不是相反!因此,倒立摆便会加速偏离垂直位置,直到倒下。
如何通过控制使得倒立摆能够像单摆一样,稳定在垂直位置呢?要达到这一目的,只有两个办法:一个是改变重力的方向;另一个是增加额外的受力,使得恢复力与位移方向相反才行。显然能够做到的只有第二种方法。
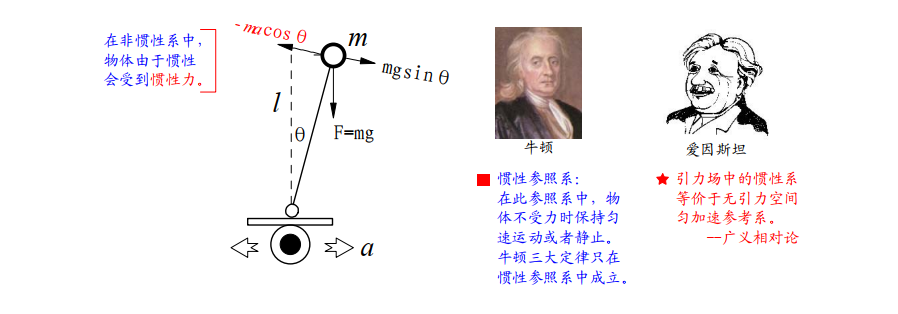
控制倒立摆底部车轮,使得它作加速运动。这样站在小车上(非惯性系,以车轮作为坐标原点)分析倒立摆受力,它就会受到额外的惯性力,该力与车轮的加速度方向相反,大小成正比。这样倒立摆所受到的回复力为:
(2-1)
式中,由于很小,所以进行了线性化。假设负反馈控制是车轮加速度与偏角成正比,比例为 。如果比例 ( 是重力加速度),那么回复力的方向便于位移方向相反了。
此外,为了使得倒立摆能够尽快地在垂直位置稳定下来,还需要增加阻尼力。虽然存在着空气和摩擦力等阻尼力,相对阻尼力比较小。因此需要另外增加控制阻尼力。增加的阻尼力与偏角的速度成正比,方向相反。因此式(2-1)可变为
(2-2)
按照上面的控制方法,可把倒立摆模型变为单摆模型,能够稳定在垂直位置。因此,可得控制车轮加速度的控制算法
(2-3)
式中, 为车体倾角;为角速度;、均为比例系数;两项相加后作为车轮加速度的控制量。只要保证在、条件下,可以使得车体像单摆一样维持在直立状态。其中有两个控制参数,决定了车体是否能够稳定到垂直平衡位置,它必须大于重力加速度;决定了车体回到垂直位置的阻尼系数,选取合适的阻尼系数可以保证车体尽快稳定在垂直位置。