修改模式
本小节教你修改代码,更改小车的开机模式。出厂默认的开机模式为遥控模式。共有四种模式(遥控模式、红外循迹模式,超声波避障模式,超声波跟随模式)提供选择。
需要安装 MDK5.17,或以上版本。没安装的同学可以参考《安装MDK-ARM软件》小节。
双击 BasicBalance.uvprojx工程文件,使用 MDK-ARM 软件打开工程,然后在工程左侧的 USER 文件夹下找到 manage.h 头文件和 manage.c 源文件,它们的主要功能是配置开机模式。
在 manage.h 头文件中,定义了几个宏定义:
#define CONTROL_MODE 1 //遥控模式
#define INFRARED_TRACE_MODE 2 //红外寻迹模式
#define ULTRA_FOLLOW_MODE 3 //超声波跟随模式
#define ULTRA_AVOID_MODE 4 //超声波避障模式
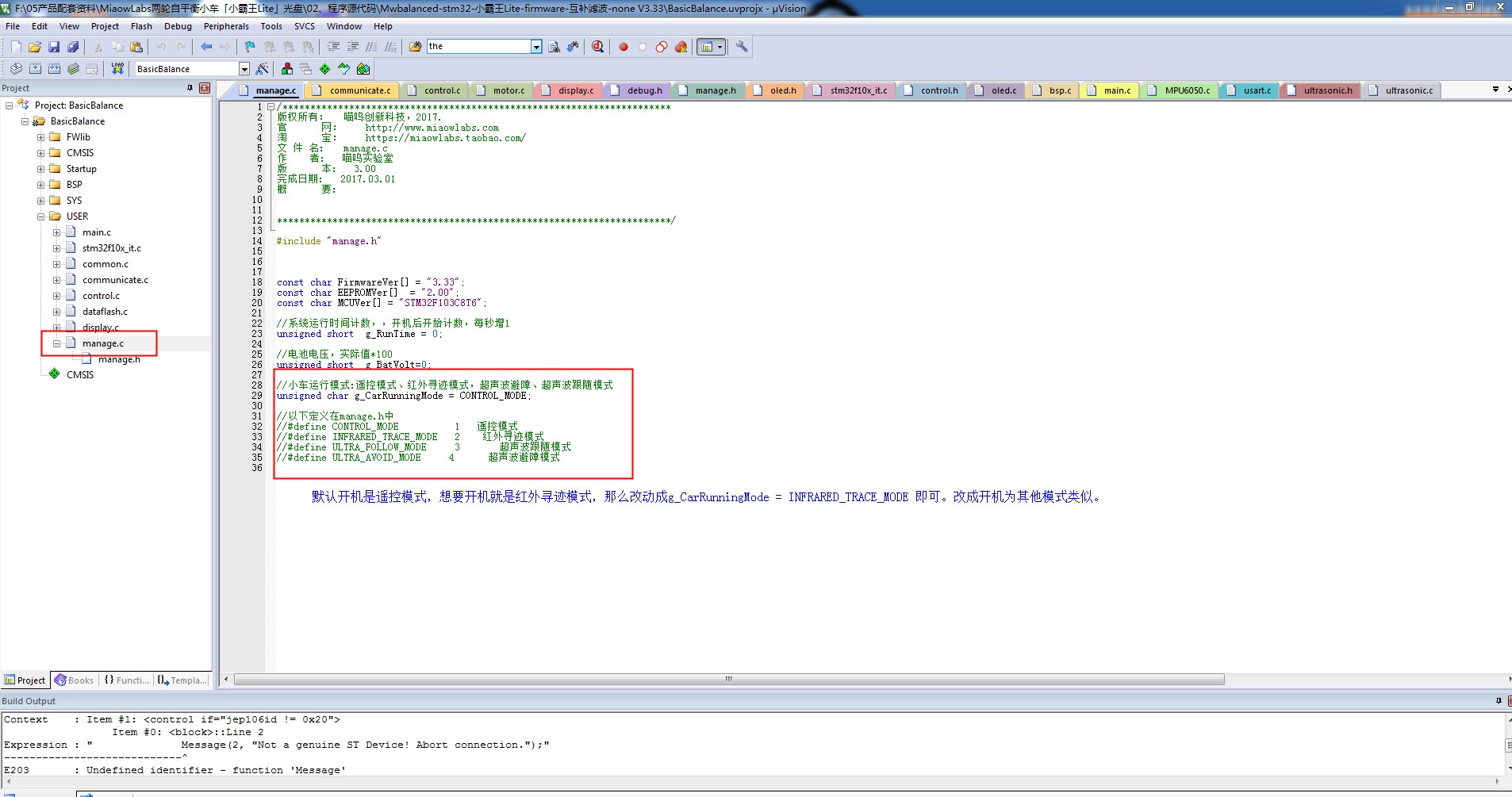
在 manage.c 中我们能找到配置相关的语句:
unsigned char g_CarRunningMode = CONTROL_MODE; //默认为遥控模式
通过修改该语句就可以修改小车的开机工作模式。比如,我想让小车开机就是工作在红外寻迹模式,那么可以这样修改:
unsigned char g_CarRunningMode = INFRARED_TRACE_MODE;//红外寻迹模式
比如,我想让小车开机就是工作在超声波避障模式,那么可以这样修改:
unsigned char g_CarRunningMode = ULTRA_AVOID_MODE;//超声波避障模式
修改完代码之后,重新编译代码,并烧录进小车里,就能更改想要的开机工作模式。