洞洞板底板手工焊接教程
本小节教你如何焊接洞洞板底板。需要有一定的焊接基础,比如会使用烙铁,并且焊点饱满不虚焊。
对于毕设党、课设党、参赛党而言,虽然原来的底板可以直接使用,但是毕竟不是自己亲手焊接出来的,会缺少一点成就感。如果能自己动手焊接一块底板,不仅拥有爆棚的成就感,而且通过毕设、课设,甚至获奖的概率会大大提高。在焊接过程中,你不但能锻炼焊接能力,而且能进一步加深对小车系统电路的理解,在答辩的过程中可以理直气壮地回答问题。
手工焊接存在一定的难度,要有优良的焊接能力。如果是第一次进行焊接,我建议多备份一套物料,在焊坏第一套物料损坏之后,可以使用第二套物料焊接。每个人的焊接水平都不一样,有的人可能一次过焊接成功,有的人焊坏几块板都不一定成功。但是只要坚持练习焊接,随着焊接水平的提高,总会成功。本教程仅作为指引,不保证一定成功。
你需要提前准备好焊接设备:
- 电烙铁
- 焊锡
- 镊子
焊接过程
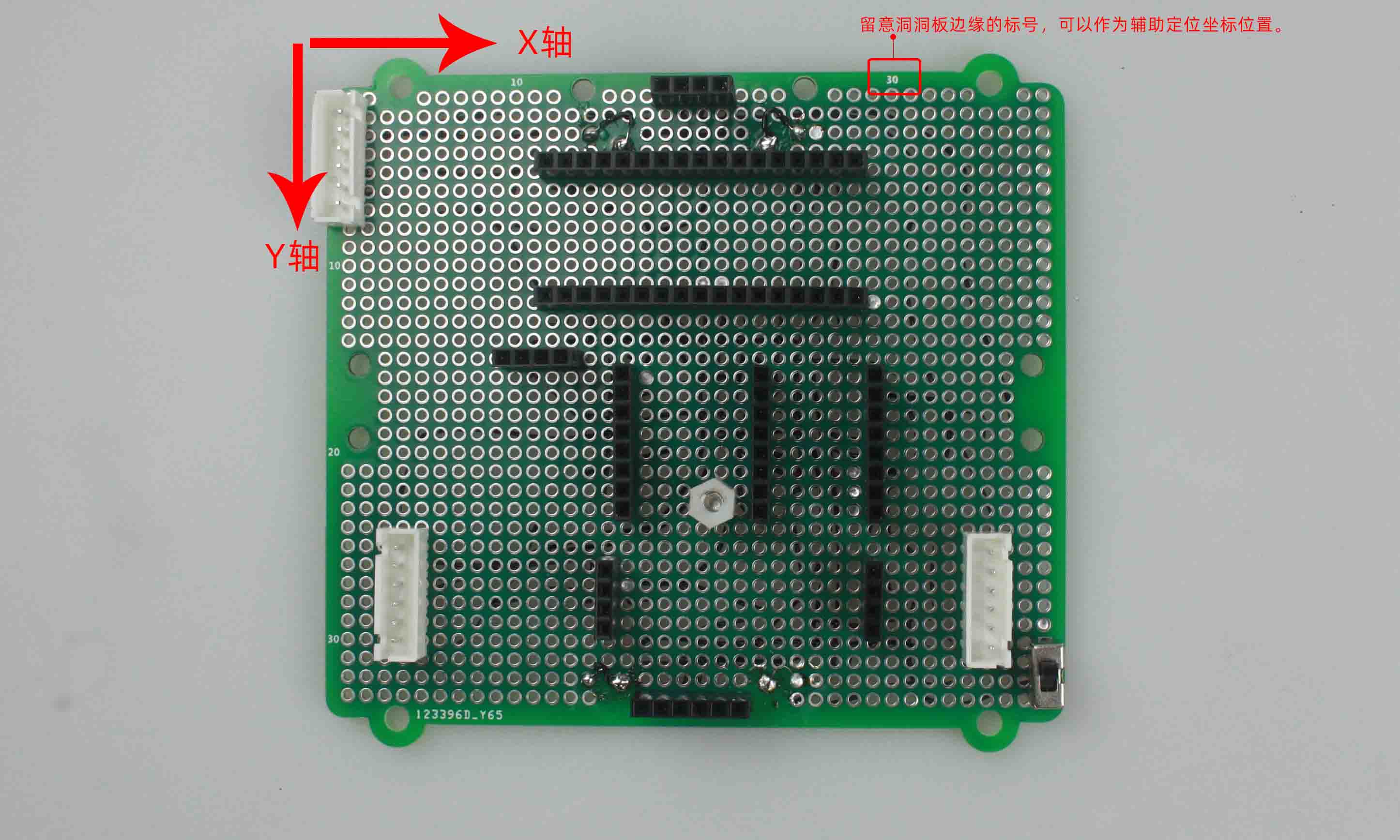
知晓预设的X轴Y轴方向。这个方向是我们自己定义的,为了方便和保证我们后面的焊接行动是统一的。
我们以洞洞板左上方为原点,坐标定义为(1,1),向下为 Y 轴正方向,向右为 X 轴正方向。将原点坐标定义为 (1,1),而不是 (0,0),是对应洞洞板四周的原标号。后面我们通过数孔位,就可以确定排母插座的摆放位置。为了提高焊接成功率,请务必按照我们的位置摆放。如下图所示,
我们从上往下,逐步逐个焊接。
焊接排母
第一步,在坐标 (18~21,1) 四个孔位焊接一个 4Pin 单排母。这里的 X 轴坐标 18~21,表示 18、19、20、21 四个点,后面的表达同理。在焊接时,可以先焊接一个引脚作为定位,然后观察排母是否焊接到位,摆放是否垂直。如果不垂直,则可以加热定位引脚,纠正错误,直至没问题,再焊接其他引脚。后面焊接排母和插座都可以先焊接定位引脚,观察没问题,再焊接其他引脚,不再重复强调。
第二步,在坐标(12~28,5),共 17 个孔位焊接一个 17Pin 单排母。
第三步,在坐标(12~28,12),共17个孔位焊接另一个 17Pin 单排母。与第二步的 17Pin 排母一起组成底座,用于放置核心板。
第四步,在坐标(10~14,15),共 4 个孔位焊接一个 4Pin 单排母。该排母用于放置蓝牙模块。
第五步,在进行第五步之前,先跳到第十五步安装支撑柱,然后把 MPU-6050 模块插到排母上,用螺丝固定模块在支撑柱上,再进行焊接排母引脚,这样可以最大程度把 MPU-6050 模块的排母焊正。MPU-6050 模块焊歪,会影响姿态数据输出。在坐标(16,16~23),共 8 个孔位焊接一个 8Pin 单排母。该排母用于放置 MPU-6050 模块。
第六步,在坐标(23,16~23),共 8 个孔位焊接一个 8Pin 单排母。
第七步,在坐标(29,16~23),共 8 个孔位焊接一个 8Pin 单排母。与第六步的排母一起组成底座,用于放置 TB6612FNG 驱动模块。
第八步,在坐标(15,26~29),共 4 个孔位焊接一个 4Pin 单排母。
第九步,在坐标(29,26~29),共 4 个孔位焊接一个 4Pin 单排母。与第八步的排母一起组成底座,用于放置稳压模块。
第十步,在坐标(17~22,33),共 6 个孔位焊接一个 6Pin 单排母。该排母用于放置 OLED 显示模块。
焊接插座
第十一步,在坐标(1,2~7),共 6 个孔位焊接一个 XH2.54-6P 直插插座,插座缺口朝向 X 轴正方向。
第十二步,在坐标(4,25~30),共 6 个孔位焊接一个 XH2.54-6P 直插插座,插座缺口朝向 X 轴负方向。
第十三步,在坐标(35,25~30),共 6 个孔位焊接一个 XH2.54-6P 直插插座,插座缺口朝向 X 轴正方向。
焊接开关
第十四步,在坐标 (38,30~34),共 5 个孔位焊接拨动开关。
安装支撑柱
第十五步,在坐标(20~21,22~23),共 1 个 M3 螺丝孔安装白色支撑柱。该支撑柱用于固定 MPU-6050 模块,支撑柱与排母形成三角形,可以很好地固定模块。
至此,顶层的排母、插座、开关已经焊接完毕。接下来,开始焊接底层的走线。
焊接走线
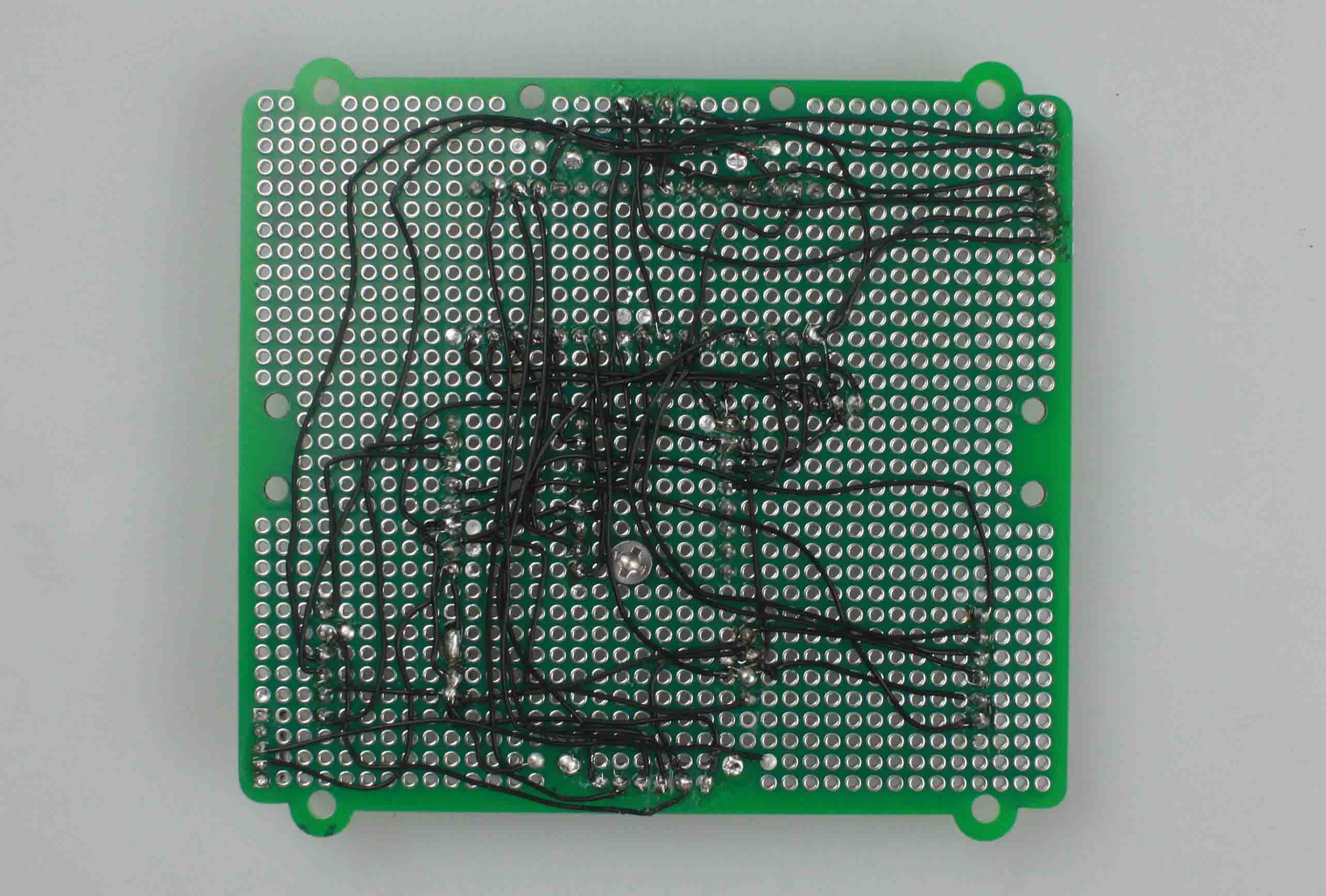
我们在顶层数孔位,在底层焊接。在翻转洞洞板后,左右顺序是对调的,要注意并反复核对引脚顺序,再进行焊接。
第十六步,延续上面的步骤,到这里是第十六步。因为每个模块都要接地,所以地线的线路最多、最复杂。其他信号线相比之下显得十分简单。因此我们先从最难的下手,先焊接地线。这里把焊接地线分成 12 小步:
- 超声波模块和核心板的地线相连,从坐标(18,1),飞一根线连接坐标 (12,12)。
- 核心板和红外模块的地线相连,从坐标 (12,12) 飞一根线连接坐标 (1,6)。
- 核心板和蓝牙模块的地线相连,从坐标(12,12)飞一根线连接坐标(11,15)。
- 蓝牙模块和 MPU-6050 模块的地线相连,从坐标(11,15)飞一根线连接坐标(16,17)。
- MPU-6050 模块和 TB6612FNG 驱动模块的地线相连,从坐标(16,17) 飞一根线连接坐标(29,21)。
- TB6621FNG 驱动模块和稳压模块的地线相连,从坐标(29,21)飞一根线连接坐标(29,29)。
- 稳压模块与右电机编码器的地线相连,从坐标(29,29)飞一根线连接坐标(35,29)。
- 稳压模块的输入地线和输出地线相连,从坐标(29,29)飞一根线连接坐标(15,26)。
- 稳压模块的输出地线与左电机相连,从坐标(15,26)飞一根线连接坐标(4,26)。
- 稳压模块的输入地线和 OLED 显示模块的地线相连,从坐标(29,29)飞一根线连接坐标(17,34)。
- 稳压模块的输入地线和电池负极相连,从(29,29)飞一根线连接坐标(25,32)。
- 地线的焊接到这里暂停一下。等到后面焊接电池盒,我们再从坐标(25,32)飞一根线到电池盒负极焊接,才最终完成地线的全部焊接。焊接到这里,只要焊接没差错,所有的地线都应该是连通的。我们拿万用表,推到二极管档,以稳压模块的输入地线坐标(29,29)为参考点,把其他焊点全部测一遍导通与否。
第十七步,焊接电池正极输入线路。电池盒和拨动开关连接,从坐标(14,32)飞一根线连接坐标(38,32)。等到后面焊接电池盒,再从坐标(14,32)飞一根线连接电池盒正极,我们把这根线留到最后再焊接。拨动开关和稳压模块连接,从坐标(38,33)飞一根线连接坐标(29,26)。因为电机是直接由电池供电,所以电池正极线路也需要连接 TB6612FNG。我们已经从拨动开关连接到稳压模块,遵循就近原则飞线,稳压模块和 TB6612FNG 驱动模块连接,从坐标(29,26)飞一根线连接坐标(29,23)。焊接到这里,电池正极输入线路已焊接完成。为了保证焊接质量,我们要拿万用表测量每两个焊点之间的通断情况。
第十八步,焊接 5V 电源线。稳压模块输出 5V 与TB6612FNG 相连,从坐标(15,29)飞一根线连接坐标(29,22),再从坐标(29,22)飞一根线连接坐标(23,20)。连接超声波模块,从坐标(23,20)飞一根线连接坐标(21,1)。连接红外模块插座,从坐标(21,1)飞一根线连接坐标(1,7)。为了保证焊接质量,我们要拿万用表测量每两个焊点之间的通断情况,并且测试 5V 电源线跟地线是否有短路连通现象。如果有连通,那么就要检查哪里短路了。
第十九步,焊接 3.3V 电源线。稳压模块输出 3.3V 与 OLED显示模块相连,从坐标(15,28)飞一根线连接坐标(33,21)。连接右边电机编码器,从坐标(33,21)飞一根线连接坐标(35,26),连接左边电机编码器,从坐标(15,28)飞一根线连接坐标(4,29)。连接 MPU-6050 模块,从坐标(15,28)飞一根线连接坐标(16,16)。连接超声波模块,从坐标(16,16)飞一根线连接坐标(10,15)。连接核心板,从坐标(16,16)飞一根线连接坐标(13,5)。为了保证焊接质量,我们要拿万用表测量每两个焊点之间的通断情况。并且测试 3.3V 电源线跟地线是否有短路连通现象。如果有连通,那么就要检查哪里短路了。
到这里,连线最多最复杂的几个线路:地线、电池正极输入、5V 电源线、3.3V 电源线都已经焊接完成,剩下的线路都相对简单了。
第二十步,焊接核心板和 MPU-6050 模块的信号线。SCL 线,从坐标(13,12)飞一根线连接坐标(16,18)。SDA 线,从坐标(14,12)飞一根线连接(16,19)。为了保证焊接质量,我们要拿万用表测量每两个焊点之间的通断情况。
第二十一步,焊接核心板和 TB6612FNG 驱动模块的信号线。PWMB 线,从坐标(24,12)飞一根线连接坐标(23,17)。BIN2 线,从坐标(21,12)飞一根线连接坐标(23,18)。BIN1 线,从坐标(20,12)飞一根线连接坐标(23,19)。AIN1 线,从坐标(25,12)飞一根线连接坐标(23,21)。AIN2 线,从坐标(26,12)飞一根线连接坐标(23,22)。PWMA 线,从坐标(23,12)飞一根线连接坐标(23,23)。其中,PWMA、PWMB 是连接核心板 PWM 引脚,控制电机速度;AIN1、AIN2、BIN1、BIN2 是连接核心板 GPIO 引脚,控制电机转向。为了保证焊接质量,我们要拿万用表测量每两个焊点之间的通断情况。
第二十二步,焊接 TB6612FNG 和电机接口的输出引脚。BO1 线,从坐标(29,17)飞一根线连接坐标(35,30)。BO2 线,从坐标(29,18)飞一根线连接坐标(35,25)。AO2 线,从坐标(29,19)飞一根线连接坐标(4,25)。AO1 线,从坐标(29,20)飞一根线连接坐标(4,30)。为了保证焊接质量,我们要拿万用表测量每两个焊点之间的通断情况。
第二十三步,焊接核心板和编码器的信号线。左电机 A 相,从坐标(17,12)飞一根线连接坐标(4,27)。左电机 B 相,从坐标(18,12)飞一根线连接坐标(4,28)。右电机 A 相,从坐标(15,5)飞一根线连接坐标(35,28)。右电机 B 相,从坐标(14,5)飞一根线连接坐标(35,27)。为了保证焊接质量,我们要拿万用表测量每两个焊点之间的通断情况。
第二十四步,焊接核心板和蓝牙模块的信号线。Rx 线,从坐标(27,12)飞一根线连接坐标(14,15)。Tx 线,从坐标(28,12)飞一根线连接坐标(13,15)。为了保证焊接质量,我们要拿万用表测量每两个焊点之间的通断情况。
第二十五步,焊接核心板和超声波模块的信号线。Echo 线,从坐标(19,1)飞一根线连接坐标(21,5)。Trig 线,从坐标(20,1)飞一根线连接坐标(19,12)。为了保证焊接质量,我们要拿万用表测量每两个焊点之间的通断情况。
第二十六步,焊接核心板和红外模块插座的信号线。Rb 线,从坐标(24,5)飞一根线连接坐标(1,2)。Ra 线,从坐标(19,5)飞一根线连接坐标(1,3)。Lb 线,从坐标(18,5)飞一根线连接坐标(1,4)。La 线,从坐标(16,5)飞一根线连接坐标(1,5)。为了保证焊接质量,我们要拿万用表测量每两个焊点之间的通断情况。
第二十七步,焊接核心板和 OLED 显示模块的信号线。SCL 线,从坐标(25,5)飞一根线连接坐标(19,34)。SDA 线,从坐标(26,5)飞一根线连接坐标(20,34)。RST 线,从坐标(27,5)飞一根线连接坐标(21,34)。DC 线,从坐标(15,12)飞一根线连接坐标(22,34)。为了保证焊接质量,我们要拿万用表测量每两个焊点之间的通断情况。
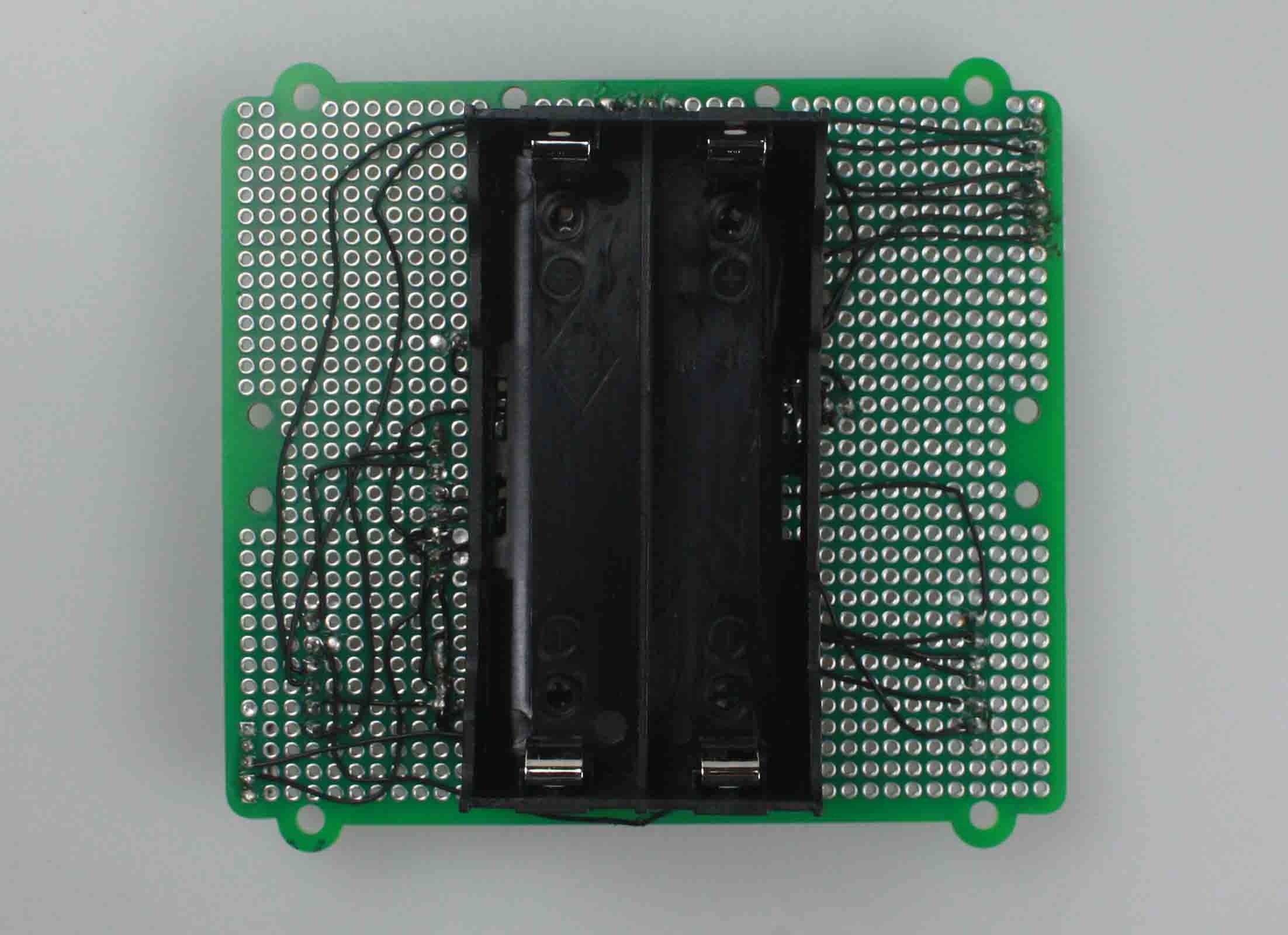
第二十八步,焊接电池盒。电池盒的两个电池槽之间是没有电气连接的,电池盒可以根据使用方式(并联/串联)自行进行电气连接。在这里,我们是将两节电池串联使用,即两个电池槽要进行串联的电气连接。从坐标(14,3)飞一根线到坐标(25,3),从底层走飞线。然后接下来的四根线注意在顶层飞线:
- 在坐标(14,3)单点焊接一根飞线出来,预留 10mm 长度,另一端暂时悬空,等下和电池盒引脚一起焊接。
- 在坐标(25,3)单点焊接一根飞线出来,预留 10mm 长度,另一端暂时悬空,等下和电池盒引脚一起焊接。
- 在坐标(25,32),这个焊点在第十六步就已经焊接,单点焊接一根飞线出来,预留 10mm 长度,另一端暂时悬空,等下和电池盒引脚一起焊接。
- 在坐标(14,32),这个焊点在第十七步就已经焊接,单点焊接一根飞线出来,预留 10mm 长度,另一端暂时悬空,等下和电池盒引脚一起焊接。
- 焊接电池盒。因为电池盒本身没有电气连接,所以对放置方向没有规定,你转动 180 度焊接也可以。将电池盒放置好,将上面预留的四根飞线分别就近焊接在电池盒引脚上。坐标(14,3)飞线连接电池盒引脚(15~16,3~4),坐标(25,3)飞线连接电池盒引脚(23~24,3~4),坐标(25,32)连接电池盒引脚(23~24,32~33),坐标(14,32)连接电池盒引脚(15~16,32~33)。
焊接完成。