平衡原理
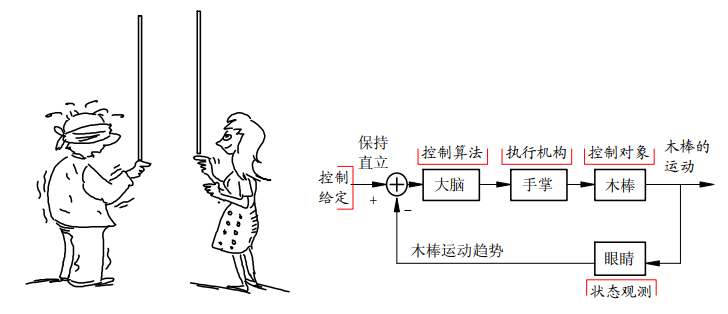
控制小车平衡的直观经验来自于人们日常生活经验。一般的人通过简单练习就可以让一个直木棒在手指尖上保持直立。这需要两个条件:一个是托着木棒的手掌可以移动; 另一个是眼睛可以观察到木棒的倾斜角度和倾斜趋势(角速度)。通过手掌移动抵消木棒的倾斜角度和趋势,从而保持木棒的直立。这两个条件缺一不可,实际上就是控制中的负反馈机制。
世界上还没有任何一个天才杂技演员可以蒙着眼睛使得木棒在自己指尖上直立,因为没有了眼睛观察进行负反馈。
小车平衡控制也是通过负反馈来实现的,与上面保持木棒直立比较则相对简单。因为小车有两个轮子着地,车体只会在轮子滚动的方向上发生倾斜。控制轮子转动,抵消在一个维度上倾斜的趋势便可以保持车体平衡了。
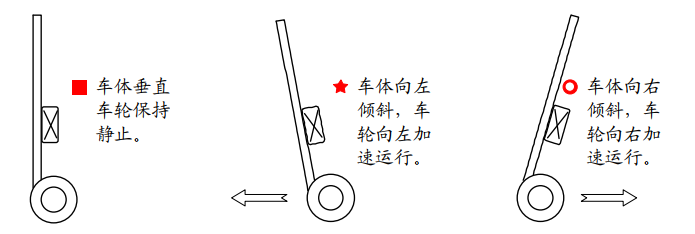
那么车轮如何运行,才能够最终保持车体平衡稳定?为了回答这个问题,可以通过建立两轮自平衡小车的运动学和动力学数学模型,设计反馈控制来保证车体的平衡。