提高PWM频率为24kHz,控制范围为0~1000
经过上面的一系列实验下来,我们已经初步调好了两轮自平衡小车的平衡功能。但是,不知道你们有没有发现两个问题:
在小车运行时,电机会发出“滋滋滋滋”的声音,长时间听到这个声音可能会感觉到烦躁。这是因为我们之前设置的 PWM 频率为 10kHz,而人耳能感受到的振动频率范围约为20Hz~20kHz。
小车的速度环输出量如果过大,会干扰到角度环。如果速度环能比较平滑地输出,那就不会干扰到角度环,小车就能够更加稳定。
提高 PWM 频率为 24kHz
既然 10kHz 是人耳能听到的工作频率,那么我们可以尝试提高 PWM 频率来解决这个问题。
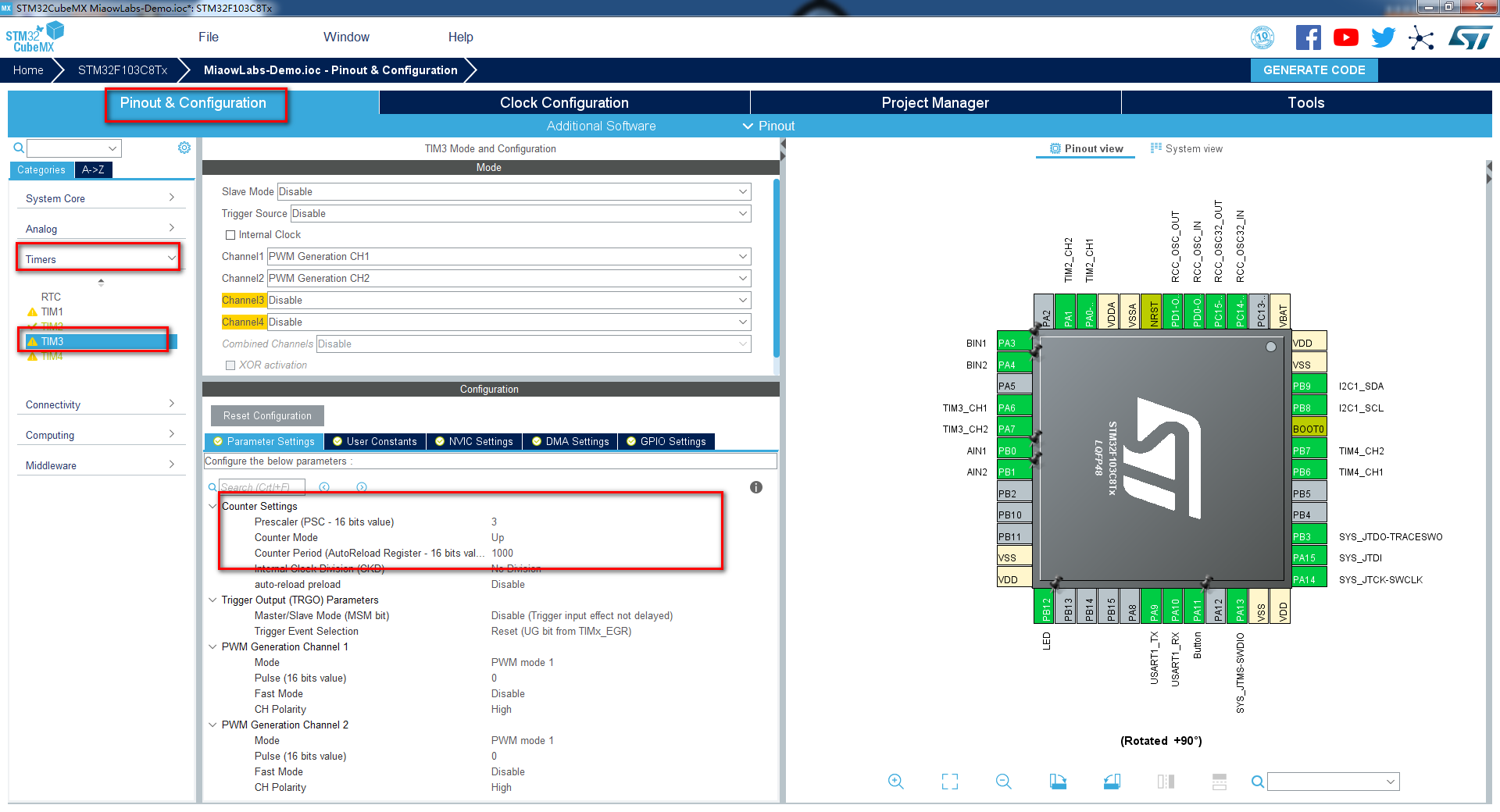
进入我们上一小节实验的 MiaowLabs-Demo 文件夹,找到 MiaowLabs-Demo.ioc 工程文件,双击,打开工程。在 Pinout&Configuration 界面中的 Timers 里点击 TIM3,在 Parameter Settings 选项卡里将 Prescaler 改成 3,Counter Period 改成 1000。此时,PWM = 72000000 / 3 / 1000 = 24000 = 24kHz。
记得,先把我们文件夹里的中文和空格全部删掉,比如将 MiaowLabs-Demo - 13、提高PWM频率为24k,控制范围为0至1000 删掉中文变成 MiaowLabs-Demo再重新生成代码。不然,会提示以下错误:

我们进入 MiaowLabs-Demo/MDK-ARM 文件夹,双击 MiaowLabs-Demo.uvprojx 文件,使用 MDK-ARM 打开工程。
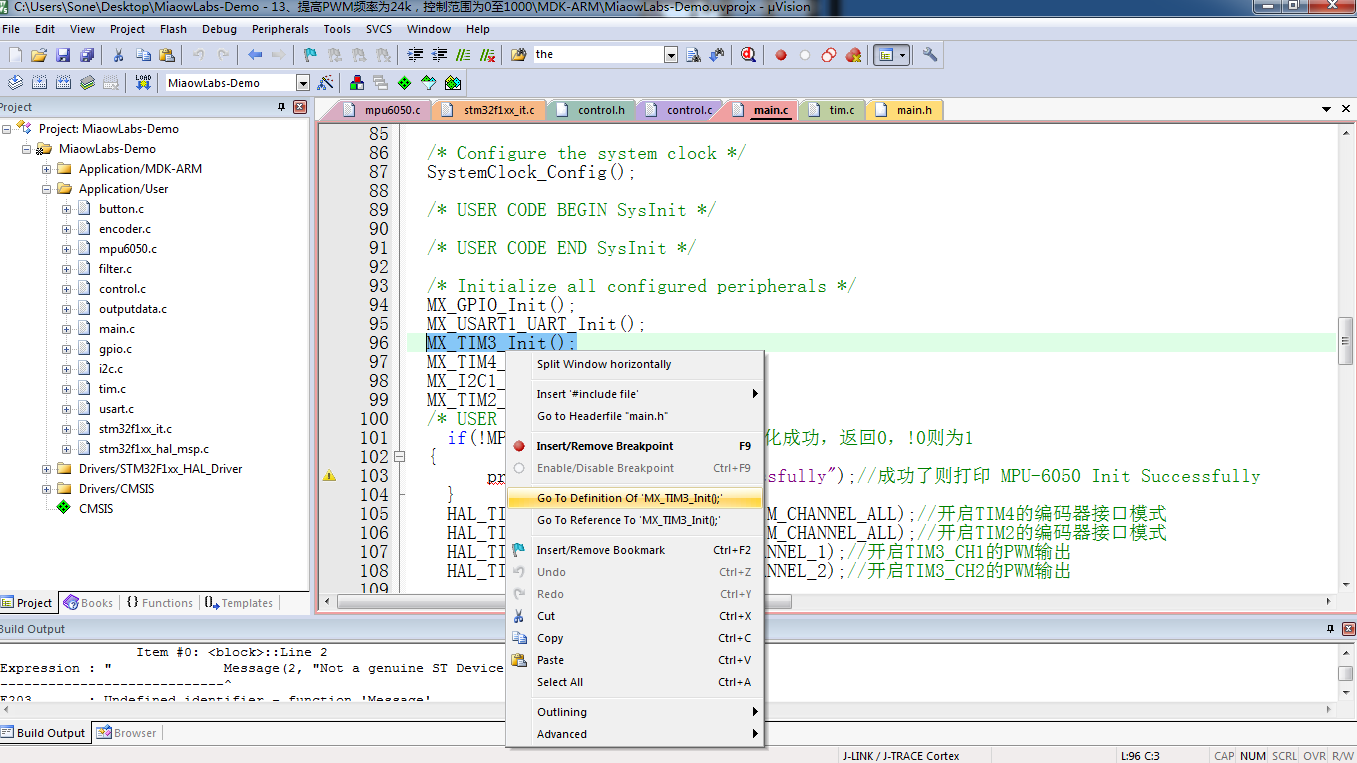
我们打开 main.c 文件,在 main() 主函数中找到 MX_TIM3_Init(),右键点击 Go to Defition of "MX_TIM3_Init();",转跳到该函数。
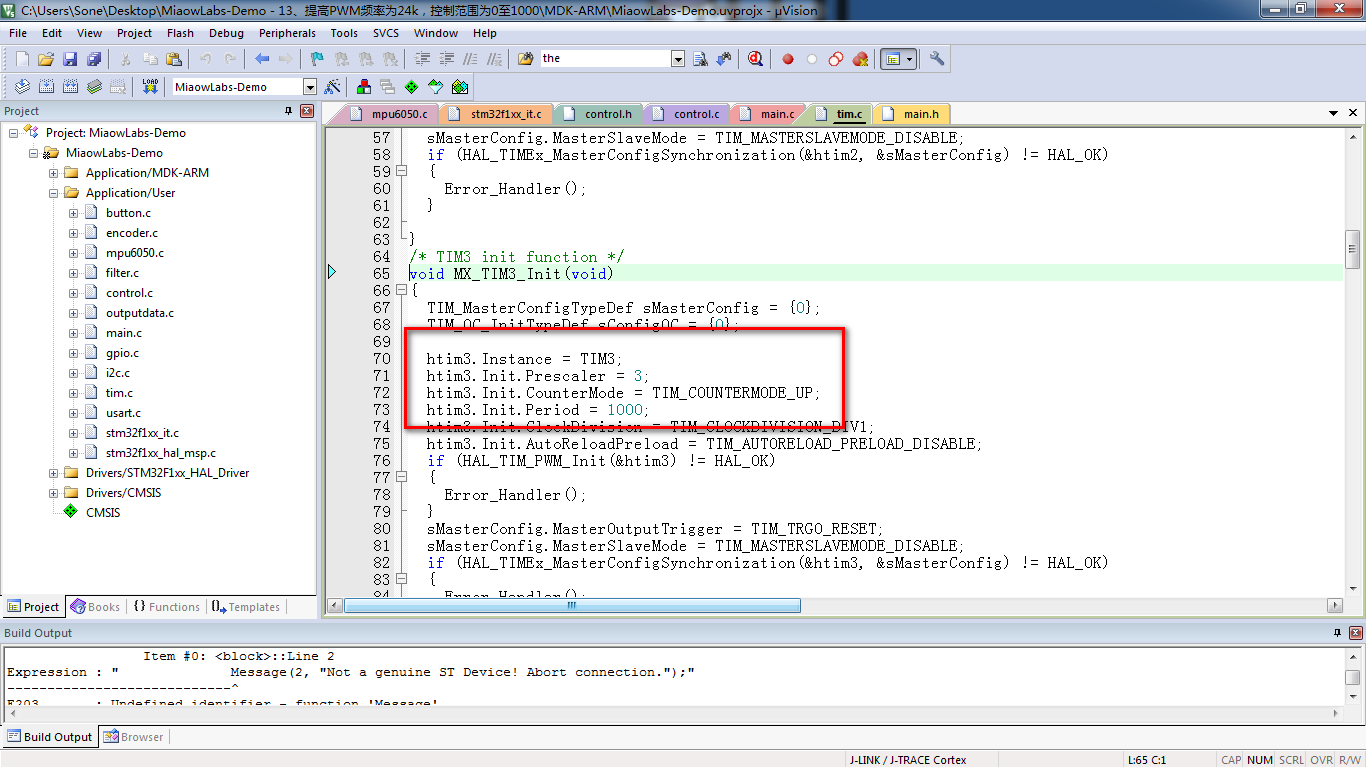
可以看到 TIM3 的初始化已经重新生成我们设定的代码。
这样一来,我们 PWM 的可控范围不再是 0~100,而是变成了 0~1000。也就是说,当设为 PWM 设为 1000 时,占空比才是 100%。
我们之前的代码也要做出对应的改动。主要是输出上下限和 PID 参数的改动。
在 control.c 里,修改代码:
#define MOTOR_OUT_MAX 1000 //占空比正最大值
#define MOTOR_OUT_MIN (-1000) //占空比负最大值
#define CAR_POSITION_MAX 900//路程(速度积分)上限
#define CAR_POSITION_MIN (-900)//路程(速度积分)下限
然后,就是重新整定 PID 参数。这里先不进行整定,接着把速度平滑输出函数加进去。
速度平滑输出
先在 control.c 中添加几个变量、宏定义:
#define SPEED_CONTROL_PERIOD 25 //速度环控制周期
float g_fSpeedControlOut,g_fSpeedControlOutNew,g_fSpeedControlOutOld;//速度环输出
int g_nSpeedControlPeriod;//速度环控制周期计算量
对速度外环控制函数 SpeedControl() 进行改造,并编写速度外环平滑输出函数 SpeedControlOutput()。
void SpeedControl(void)//速度外环控制函数
{
float fP=10.25,fI=0.108; //速度环PI参数,
float fDelta;//临时变量,用于存储误差
g_fCarSpeed = (g_lLeftMotorPulseSigma + g_lRightMotorPulseSigma ) / 2;//左轮和右轮的速度平均值等于小车速度
g_lLeftMotorPulseSigma = g_lRightMotorPulseSigma = 0; //全局变量,注意及时清零
g_fCarSpeed = 0.7 * g_fCarSpeedPrev + 0.3 * g_fCarSpeed ;//低通滤波,使速度更平滑
g_fCarSpeedPrev = g_fCarSpeed; //保存前一次速度
fDelta = CAR_SPEED_SET - g_fCarSpeed;//误差=目标速度-实际速度
g_fCarPosition += fDelta;//对速度误差进行积分
//设置积分上限设限
if((int)g_fCarPosition > CAR_POSITION_MAX) g_fCarPosition = CAR_POSITION_MAX;
if((int)g_fCarPosition < CAR_POSITION_MIN) g_fCarPosition = CAR_POSITION_MIN;
g_fSpeedControlOutOld = g_fSpeedControlOutNew;//保存上一次输出
g_fSpeedControlOutNew = fDelta * fP + g_fCarPosition * fI; //PI控制器,输出=误差*P+误差积分*I
}
void SpeedControlOutput(void)
{
float fValue;
fValue = g_fSpeedControlOutNew - g_fSpeedControlOutOld ;//速度计算量差值=本次速度计算量-上次速度计算量
g_fSpeedControlOut = fValue * (g_nSpeedControlPeriod + 1) / SPEED_CONTROL_PERIOD + g_fSpeedControlOutOld;//速度计算量差值*
}
g_fSpeedControlOutNew 为最新一次速度环控制的 PID 输出, g_fSpeedControlOutOld 为上一次速度环 PID 控制输出值,fValue 为两者之间差值,求出此次 PID 输出值较上一次变化了多少,然后按比例将变化的 fValue 值逐渐加到上一次 PID 输出值,从而得到最新的当前 PID 输出值。这里面的参数设置尤为重要,我要分多少份加,多长时间加完等等。首先来看多长时间内加完,这取决于控制周期,一定要小于等于控制周期才可以。比如说我当前的速度环控制周期为 25ms,那么我就要必须在 25ms 内将之前的 PID 输出值加到最新的 PID 输出值,所以我这里将 fvalue 值分成 25 份,每 1ms 执行一次平滑函数,每执行一次平滑函数都在之前的基础上增加 4%,这样 fvalue 值全部加完刚好是 100ms,当然要想形成每 ms 增加 4%,g_nSpeedControlPeriod 这个参数也要在 1ms 中断中不断++,直到 25ms 时间到执行速度环控制函数时将其清零。平滑地逐步逼近输出最后的计算值
这段代码的意思:速度外环平滑输出函数,速度的 PWM 改变量如果在 25ms 时刻计算出后立刻输出,会造成不平滑抖动等,这段代码本意就是把这个 25ms 周期计算一次得到的 PWM 分配到 25 个 1ms 时间去输出,平滑地逐步逼近输出最后的计算值!但是又因为 MotorOutput() 是 5ms 才运行一次,平滑输出函数的实际效果变成了将 25ms周期计算到的 PWM 分配到 5 个 5ms 时间去输出,平滑地逐步逼近输出最后的计算值!
对电机输出函数进行改造:
void MotorOutput(void)//电机输出函数,将直立控制、速度控制、方向控制的输出量进行叠加,并加入死区常量,对输出饱和作出处理。
{
g_fLeftMotorOut = g_fAngleControlOut - g_fSpeedControlOut;//这里的电机输出等于角度环控制量 + 速度环外环,这里的 - g_fSpeedControlOut 是因为速度环的极性跟角度环不一样,角度环是负反馈,速度环是正反馈
g_fRightMotorOut = g_fAngleControlOut - g_fSpeedControlOut;
/*增加电机死区常数*/
if((int)g_fLeftMotorOut>0) g_fLeftMotorOut += MOTOR_OUT_DEAD_VAL;
else if((int)g_fLeftMotorOut<0) g_fLeftMotorOut -= MOTOR_OUT_DEAD_VAL;
if((int)g_fRightMotorOut>0) g_fRightMotorOut += MOTOR_OUT_DEAD_VAL;
else if((int)g_fRightMotorOut<0) g_fRightMotorOut -= MOTOR_OUT_DEAD_VAL;
/*输出饱和处理,防止超出PWM范围*/
if((int)g_fLeftMotorOut > MOTOR_OUT_MAX) g_fLeftMotorOut = MOTOR_OUT_MAX;
if((int)g_fLeftMotorOut < MOTOR_OUT_MIN) g_fLeftMotorOut = MOTOR_OUT_MIN;
if((int)g_fRightMotorOut > MOTOR_OUT_MAX) g_fRightMotorOut = MOTOR_OUT_MAX;
if((int)g_fRightMotorOut < MOTOR_OUT_MIN) g_fRightMotorOut = MOTOR_OUT_MIN;
SetMotorVoltageAndDirection((int)g_fLeftMotorOut,(int)g_fRightMotorOut);
}
并且在 control.h 头文件中,进行声明。
extern int g_nSpeedControlPeriod;//速度环控制周期计算量
void SpeedControlOutput(void);
回到 stm32f1xx_it.c 文件中,找到滴答中断服务函数 SysTick_Handler(),进行修改。
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
g_nMainEventCount++;//每进一次中断,主事件函数自动加1
g_nSpeedControlPeriod++;//速度环控制周期计算量自动加1
SpeedControlOutput(); //速度环控制平滑输出处理,速度的pwm改变量如果在25ms时刻计算出后立刻输出,会造成不平滑抖动等,这段代码就是把这个25ms周期计算一次得到的pwm分配到5个5ms时间去输出,平滑地逐步逼近输出最后的计算值!
if(g_nMainEventCount>=5)//SysTick是1ms一次,这里判断语句大于5就是5ms运行一次
{
g_nMainEventCount=0;//主事件循环每5ms循环一次,这里清零,重新计时。
GetMotorPulse();
}else if(g_nMainEventCount==1){//这1ms时间片段获取数据和角度计算
GetMpuData();//获取MPU-6050数据
AngleCalculate(); //进行角度计算
}else if(g_nMainEventCount==2){
AngleControl(); //这1ms时间片段进行角度控制
}else if(g_nMainEventCount==3){
g_nSpeedControlCount++;
if(g_nSpeedControlCount >= 5)
{
SpeedControl(); //速度控制,25ms进行一次
g_nSpeedControlCount=0; //清零
g_nSpeedControlPeriod=0;//清零
}
}else if(g_nMainEventCount==4){
MotorOutput(); //电机输出函数,每5ms执行一次
}
ButtonScan();
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
此时,速度环控制平滑输出函数也编写好了。接着,按照上一个章节调试 PID 的步骤,重新对角度环、速度环的 PID 参数进行整定,这里不再重复说明。经过我们的调试,得到角度环 fP=65.0;fD=2.3 ,速度环 fP=10.25,fI=0.108时,可以取得良好的效果。当然,这不是最优值,萌新们可以在这个范围上下调试,以获得更好的控制效果。