电机速度闭环内环PID控制
本小节教你使用增量式 PID 算法,对带编码器的直流减速电机进行速度闭环内环控制。
闭环控制
闭环控制,即通过反馈环节,测量被控制对象的变化,用以修正电机输出的控制技术。
对于要求不高的应用,通常采用简单的开环控制。例如,给直流有刷电机的两根引线通电,电机就会旋转;施加的电压越高,电机转速越高,力量越大。但是在很多需要精密控制的场合,仅仅这种方式还是不够的,还需要依靠一定的反馈装置,将电机的转速或位置信息反馈给微控制器或其他的机械装置,通过一定的算法变成可以调节电机控制信号的输出,从而使电机的实际转速、位置等参数与我们所希望的一致。机器人控制是一个精度要求比较高的领域,例如,基于以下的一些考虑,机器人平台需要使用闭环控制。
开环控制情况下,移动机器人在爬坡时,电机速度会下降。更糟糕的是,当双轴独立驱动的移动机器人以一定的角度接近斜坡时。每一个车轮转速的下降值将会不同,结果是机器人的实际运动轨迹是沿着一条曲线而不是直线行进。
不平坦的地面会造成移动机器人的两个车轮转速之间的差异。如果转速较低的车轮的驱动电机没有得到相应的电压补给,移动机器人将偏移既定的路线。
由于安装工艺、负载不完全均衡等原因,即使是完全匹配的两个电机,并在相同的输入电压条件下,他们的速度有时仍会产生不同,即转速差。
如果采用的是 PWM 控制,即使在 PWM 信号占空比不变的条件下,随着电池电压的逐渐下降,电机供给电压也会随之降低,从而导致电机的转速与给定值不完全一致。
综合以上的一些考虑,必须选择闭环控制的方式,其工作流程如下图所示:闭环系统中加上了反馈环节(通常机器人的驱动电机使用的是增量式编码器)。在闭环控制系统中,速度指令值通过微控制器变换到功放驱动电路,功放驱动电路再为电机提供能量。编码器用于测量车轮速度的实际值并将其回馈给微控制器。基于实际转速与给定转速的差值,即“偏差”,驱动器按照一定的计算方法(如 PID 算法)调整相应的电压供给,如此反复,直到达到给定转速。
M 法测速原理
在《Timer编码器模式读取编码器》一节中,我们已经用到 M 法测速,但并未对其原理作讲解。M 法测速原理其实很简单,就是数固定时间段内的脉冲数,再用脉冲数除于时间得到速度。脉冲数是速度的一个表征量,用固定时间段内累计的脉冲数除于该固定时间,就可以求得该固定时间段的平均速度。固定时间段的时间越短,所求得的速度就越接近瞬时速度。
我们的电机上装有霍尔编码器,编码器的码盘跟电机转子同轴安装,电机转动时,码盘也随轴同转,并且转一圈会输出一定数量的脉冲。M 法是数固定时间内产生的脉冲数,在实际工程中比较好实现。而 T 法是数两个脉冲间隔的时间,T 法测速在实际工程中比较少用。
速度闭环 PID 控制
以下内容使用到上位机——虚拟示波器,其具体移植、使用方法已经在《MPU6050姿态解算和数据融合》一节中进行说明,本节不再具体讲解其移植方法,请萌新们自行温习之前的章节,按部就班来学习。
速度闭环 PID 控制,就是用速度测量值与目标值进行作差,得到控制偏差,然后通过对偏差的 PID 控制,使偏差趋向于零。
进入我们上修改过的 MiaowLabs-Demo 文件夹,再打开里面的 MDK-ARM 文件夹,找到 MiaowLabs-Demo.uvprojx 工程文件,双击,打开工程。在 MDK-ARM 工程界面,在左侧 Project 栏目下的 Application/User 文件夹里找到 control.c 源文件,双击打开该文件。
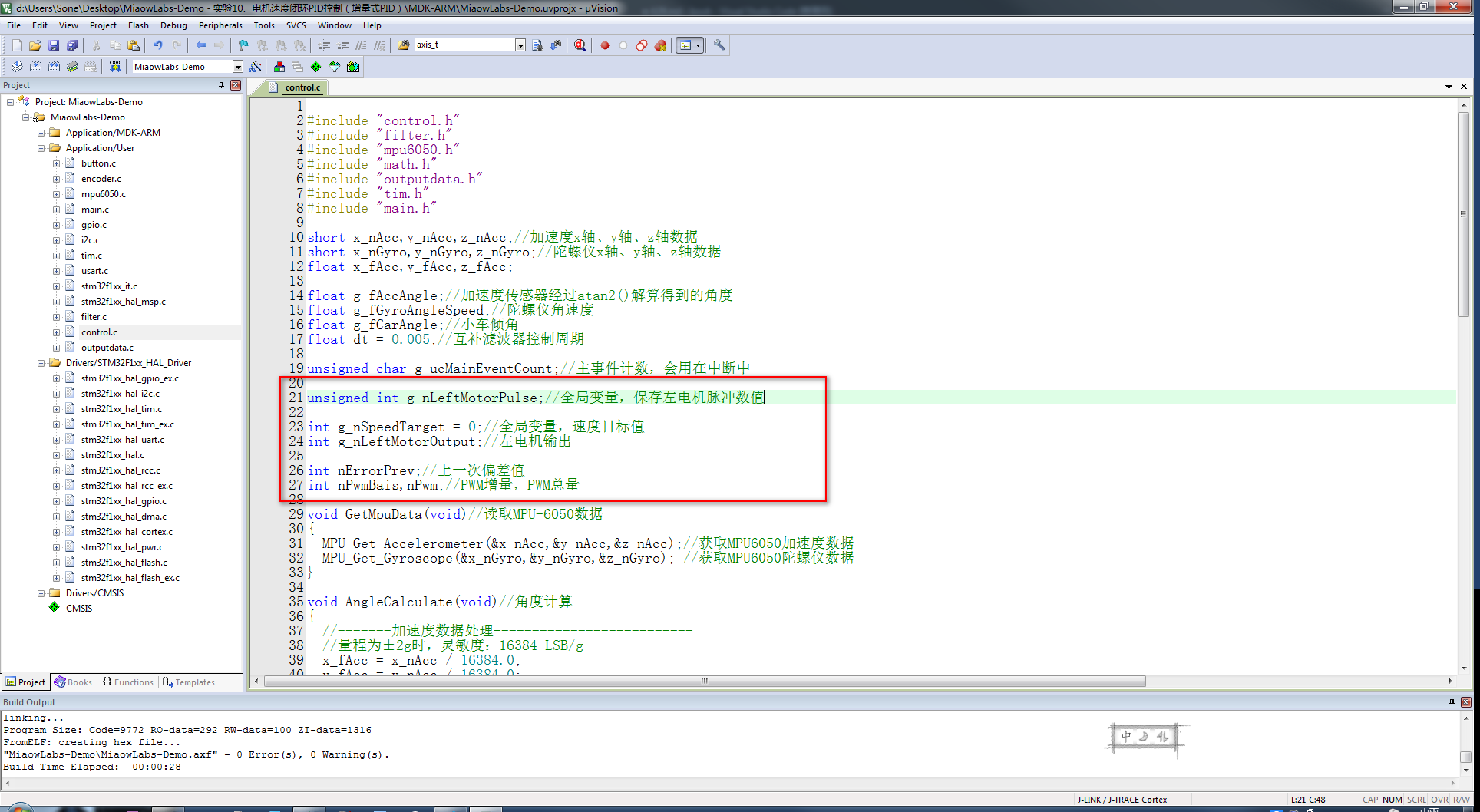
添加以下变量:
unsigned int g_nLeftMotorPulse;//全局变量,保存左电机脉冲数值
int g_nSpeedTarget = 0;//全局变量,速度目标值
int g_nLeftMotorOutput;//左电机输出
int nErrorPrev;//上一次偏差值
int nPwmBais,nPwm;//PWM增量,PWM总量
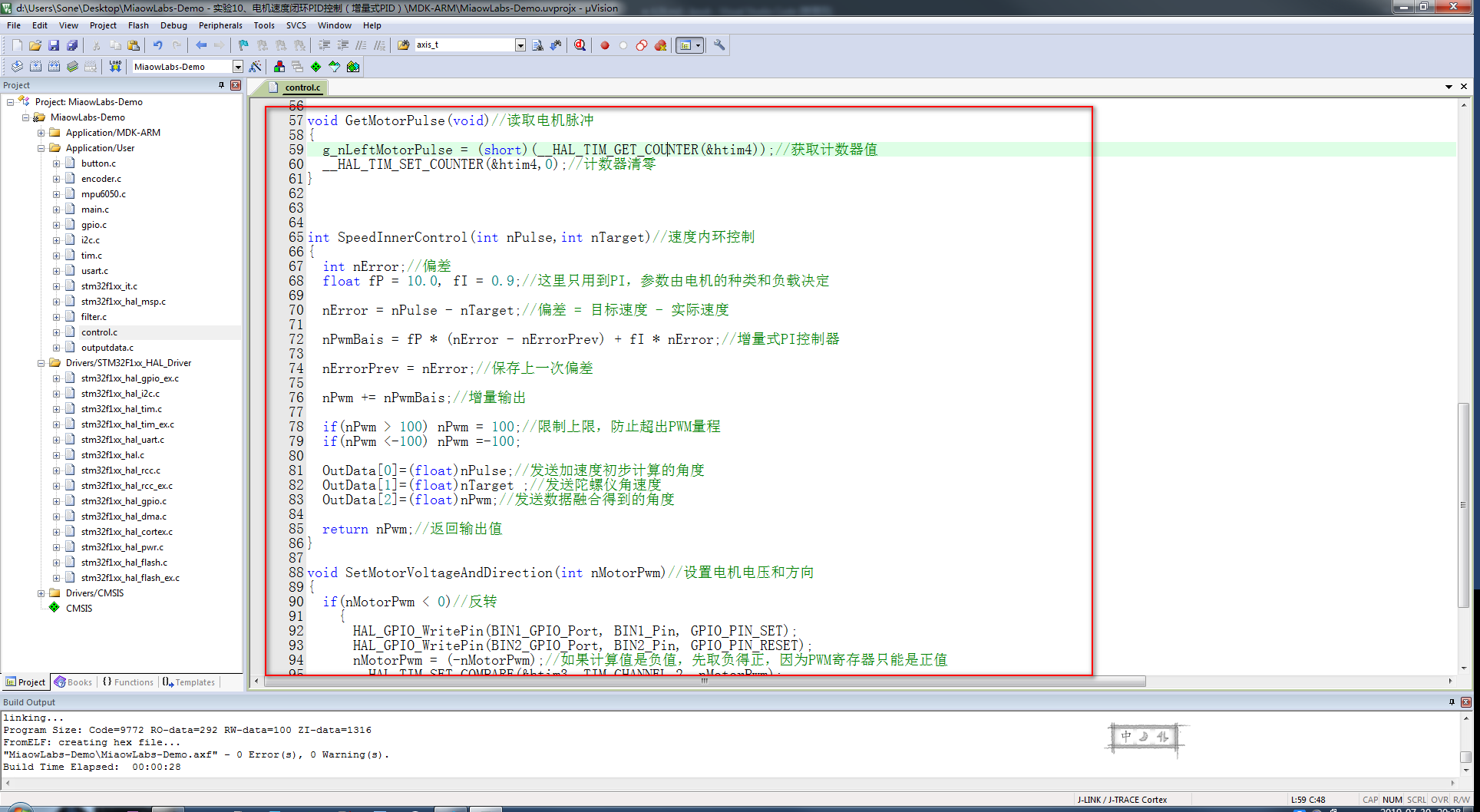
添加以下函数:
void GetMotorPulse(void)//读取电机脉冲
{
g_nLeftMotorPulse = (short)(__HAL_TIM_GET_COUNTER(&htim4));//获取计数器值
__HAL_TIM_SET_COUNTER(&htim4,0);//计数器清零
}
int SpeedInnerControl(int nPulse,int nTarget)//速度内环控制
{
int nError;//偏差
float fP = 10.0, fI = 0.9;//这里只用到PI,参数由电机的种类和负载决定
nError = nPulse - nTarget;//偏差 = 目标速度 - 实际速度
nPwmBais = fP * (nError - nErrorPrev) + fI * nError;//增量式PI控制器
nErrorPrev = nError;//保存上一次偏差
nPwm += nPwmBais;//增量输出
if(nPwm > 100) nPwm = 100;//限制上限,防止超出PWM量程
if(nPwm <-100) nPwm =-100;
OutData[0]=(float)nPulse;//速度实际值
OutData[1]=(float)nTarget ;//速度目标值
OutData[2]=(float)nPwm;//PWM输出值
return nPwm;//返回输出值
}
void SetMotorVoltageAndDirection(int nMotorPwm)//设置电机电压和方向
{
if(nMotorPwm < 0)//反转
{
HAL_GPIO_WritePin(BIN1_GPIO_Port, BIN1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(BIN2_GPIO_Port, BIN2_Pin, GPIO_PIN_RESET);
nMotorPwm = (-nMotorPwm);//如果计算值是负值,先取负得正,因为PWM寄存器只能是正值
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, nMotorPwm);
}else
{
HAL_GPIO_WritePin(BIN1_GPIO_Port, BIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(BIN2_GPIO_Port, BIN2_Pin, GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, nMotorPwm);
}
}
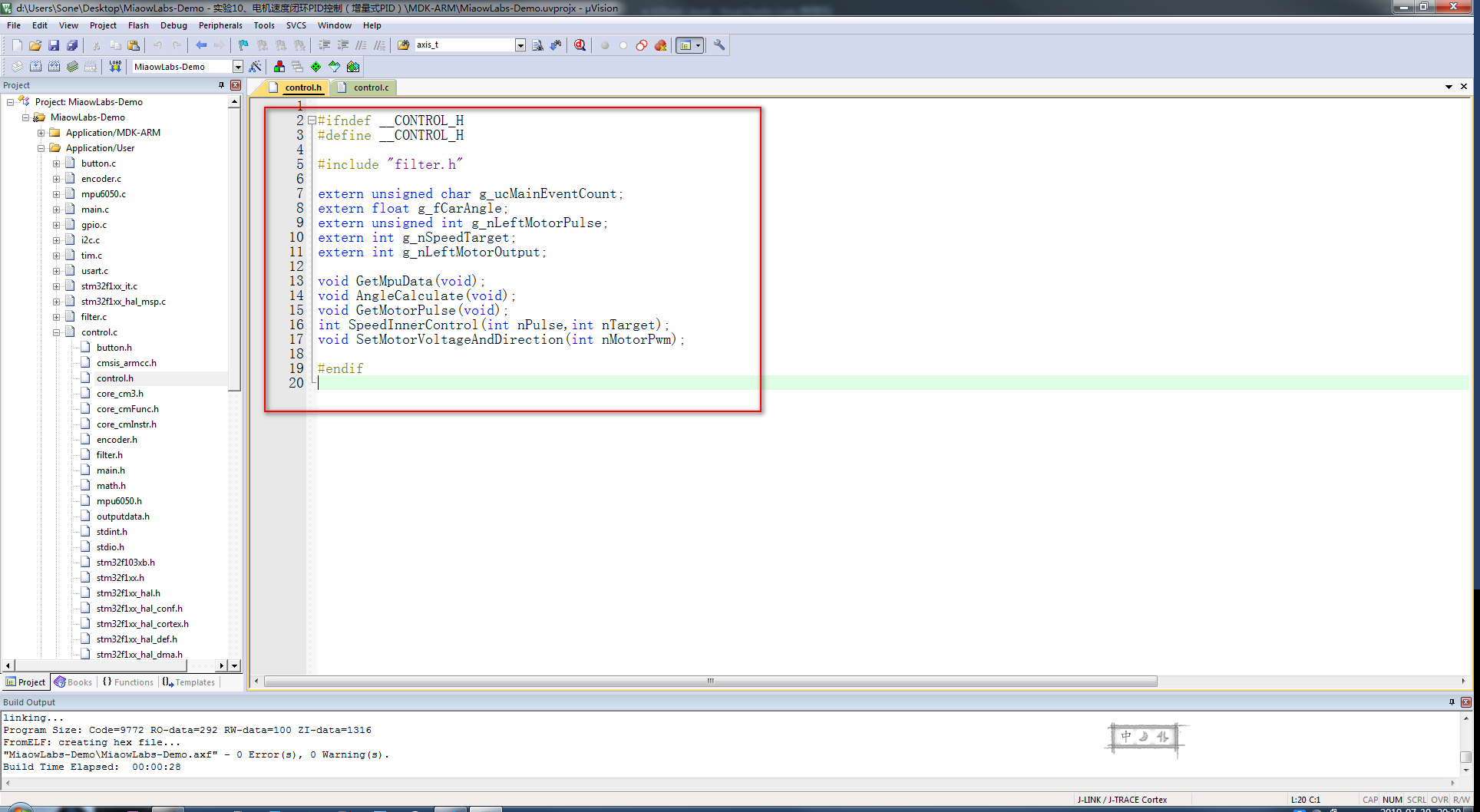
在 control.h 头文件中,声明全局变量和相关函数:
#ifndef __CONTROL_H
#define __CONTROL_H
#include "filter.h"
extern unsigned char g_ucMainEventCount;
extern float g_fCarAngle;
extern unsigned int g_nLeftMotorPulse;
extern int g_nSpeedTarget;
extern int g_nLeftMotorOutput;
void GetMpuData(void);
void AngleCalculate(void);
void GetMotorPulse(void);
int SpeedInnerControl(int nPulse,int nTarget);
void SetMotorVoltageAndDirection(int nMotorPwm);
#endif
在 MDK-ARM 左侧 Application/User 文件夹中,找到 stm32f1xx_it.c 源文件,双击打开,将以下代码敲入 SysTick_Handler() 函数中:
/* USER CODE BEGIN SysTick_IRQn 0 */
g_ucMainEventCount++;
if(g_ucMainEventCount>=5)//SysTick是1ms一次,这里判断语句大于5就是5ms运行一次
{
g_ucMainEventCount=0;
GetMotorPulse();
}else if(g_ucMainEventCount==1)
{
g_nLeftMotorOutput = SpeedInnerControl(g_nLeftMotorPulse,g_nSpeedTarget);
}else if(g_ucMainEventCount==2)
{
SetMotorVoltageAndDirection(g_nLeftMotorOutput);
}
ButtonScan();
/* USER CODE END SysTick_IRQn 0 */
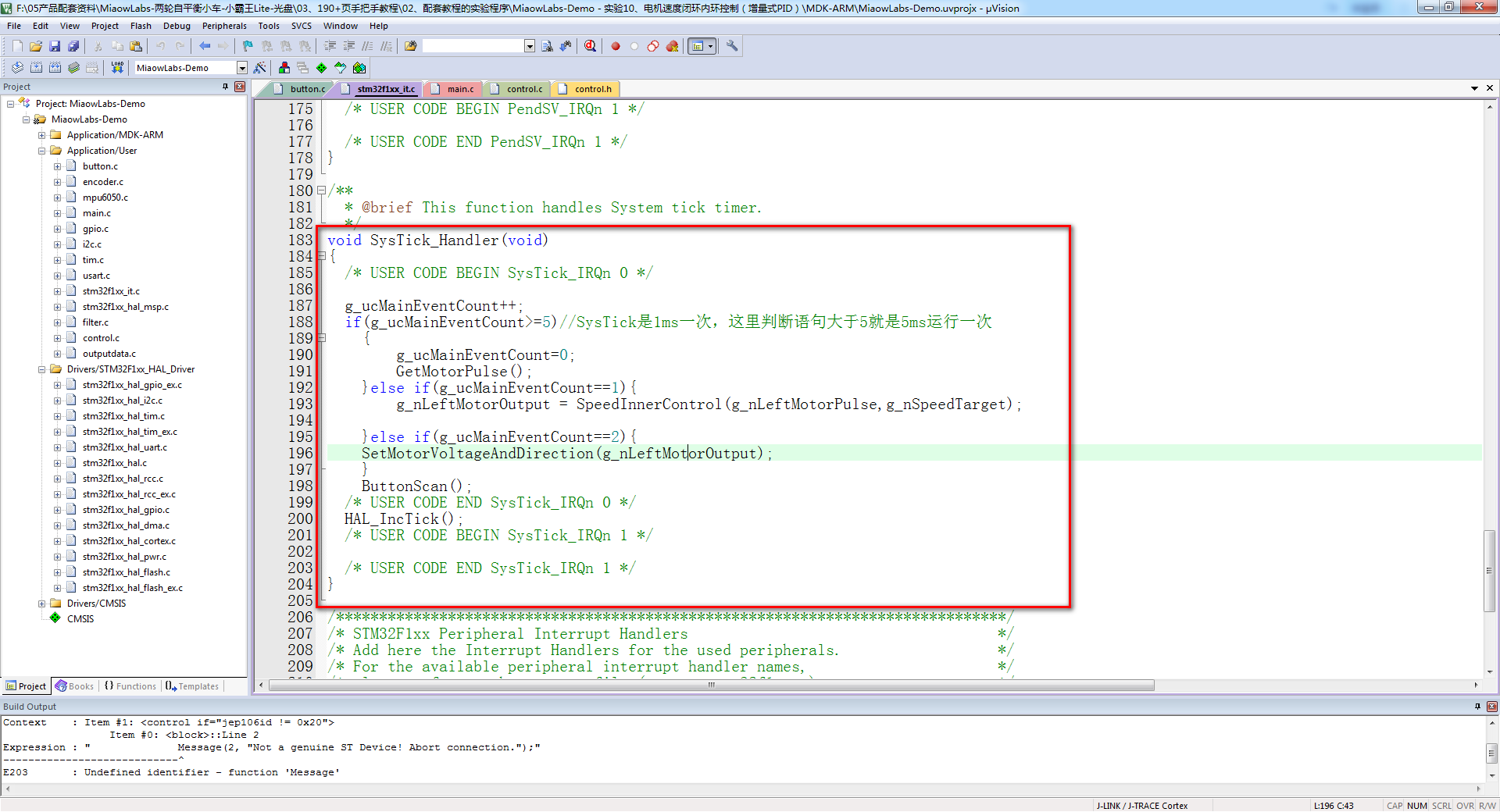
这段代码的意思是,每 5ms 对电机进行一次控制,依次读取脉冲,进行速度内环控制,设置电机电压和方向。
有些好奇萌在这里会产生困惑:为什么中断服务函数里的代码写法这么奇怪?为什么要每 1ms 单独运行一部分代码?既然要 5ms 运行一次代码,那么我直接把中断时间改成 5ms,然后在 5ms 中断里运行全部代码不更简单吗?对,你的理解是对的。按你所想的来做也是正确的。但是,因为我们这里使用的是滴答定时器 SysTick,默认就是 1ms 运行一次,而且 HAL 库里面的延时函数 HAL_Delay() 也是以滴答定时器 SysTick 为基准获得延时的时间,如果我们把 SysTick 改成了 5ms,那么还需要改动 HAL 库中的相关函数代码,更加麻烦。
在 main.c 文件中,加入初始化代码和主循环代码。
HAL_TIM_Encoder_Start(&htim4, TIM_CHANNEL_ALL);//开启TIM4的编码器接口模式
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2);//开启TIM3_CH2的PWM输出
HAL_GPIO_WritePin(BIN1_GPIO_Port, BIN1_Pin, GPIO_PIN_SET);//初始化BIN1引脚为低电平
HAL_GPIO_WritePin(BIN2_GPIO_Port, BIN2_Pin, GPIO_PIN_RESET);//初始化BIN2引脚为高电平
初始化代码主要是开启 TIM4 的编码器接口模式,和 TIM3_CH2 通道的 PWM 输出,还有 BIN1 和 BIN2 对应的控制引脚的电平初始化。
if(g_iButtonState == 1)
{
g_nSpeedTarget +=10;
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
HAL_Delay(10);
//OutPut_Data();//调用虚拟示波器的发送函数
}
OutPut_Data();//调用虚拟示波器的发送函数
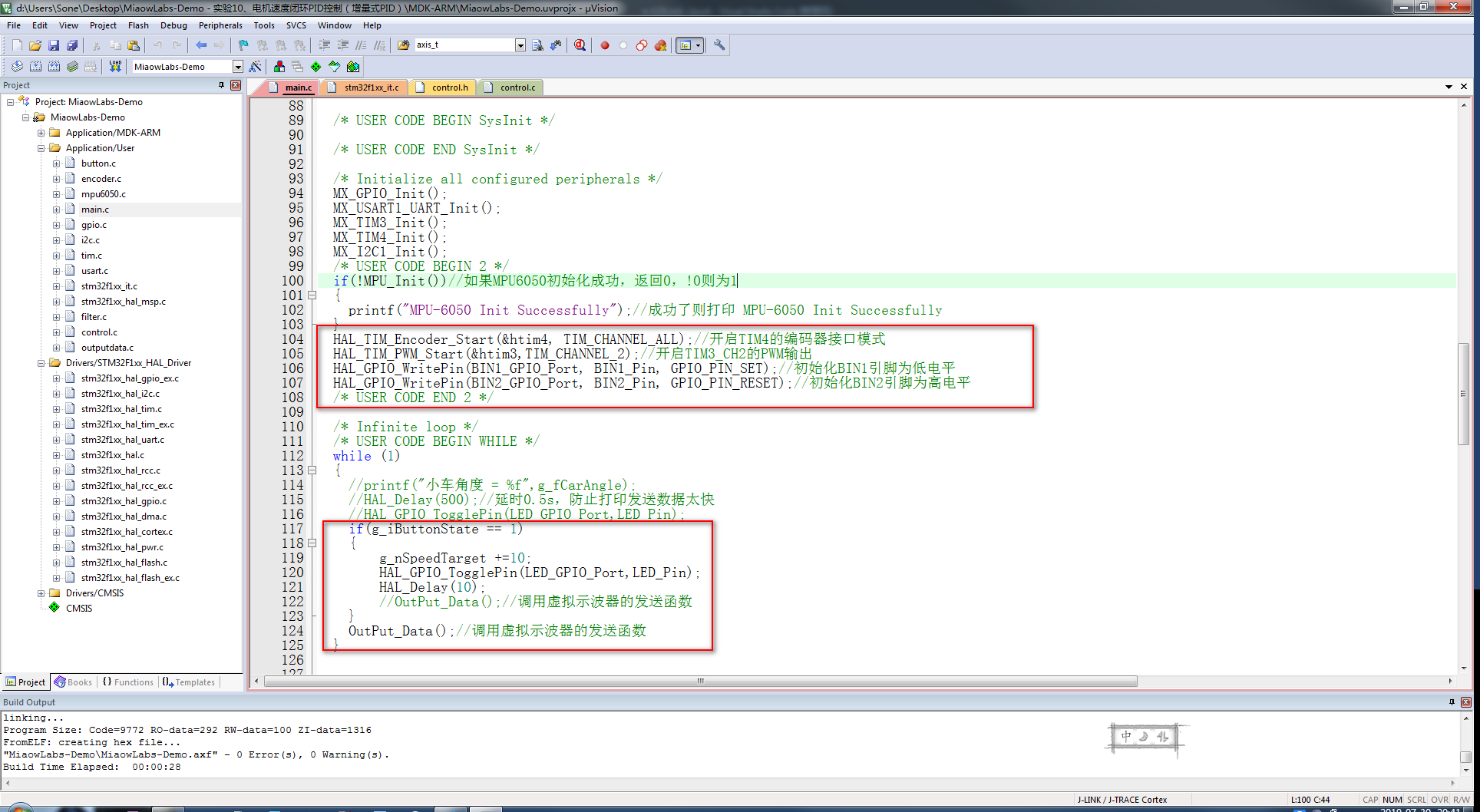
主循环代码,主要是用到了用户按钮,当用户按钮按下时,速度目标值增加 10,LED 指示灯电平翻转。另外,虚拟示波器的发送函数也放在主循环中,避免影响到中断任务的运行。使用虚拟示波器方便观察电机的速度实际值和速度预期值的联系。
留意 SpeedInnerControl() 函数,在这里我们对虚拟示波器的数组进行了重新赋值,不再是上个实验中的加速度、陀螺仪和角度值,而是速度实际值、目标值、PWM 输出值。
int SpeedInnerControl(int nPulse,int nTarget)//速度内环控制
{
int nError;//偏差
float fP = 10.0, fI = 0.9;//这里只用到PI,参数由电机的种类和负载决定
nError = nPulse - nTarget;//偏差 = 目标速度 - 实际速度
nPwmBais = fP * (nError - nErrorPrev) + fI * nError;//增量式PI控制器
nErrorPrev = nError;//保存上一次偏差
nPwm += nPwmBais;//增量输出
if(nPwm > 100) nPwm = 100;//限制上限,防止超出PWM量程
if(nPwm <-100) nPwm =-100;
OutData[0]=(float)nPulse;//速度实际值
OutData[1]=(float)nTarget ;//速度目标值
OutData[2]=(float)nPwm;//PWM输出值
return nPwm;//返回输出值
}
到这里,我们就完成了电机速度闭环内环控制的代码框架搭建。在 SpeedInnerControl() 函数中,里面有两个变量 fP、fI,电机速度闭环的关键点就在于通过整定 fP、fI 参数,使电机能够快速、稳定地达到预设的期望速度。
编译代码,将代码烧录到小车。小车的电机应该组装好,并用充电器垫在小车的电池盒下方,便于观察轮子转动情况。打开虚拟示波器,通过相应曲线可以更快速地整定参数。
所有测试都是在空载, PWM 载波为 10KHz 的情况下进行。
取 fP = 0,fI = 0.1 时,响应曲线如下:
其中红线代表电机实际速度,黄线代表电机期望速度。每隔一段时间,按下核心板上的用户按钮,给予电机一个阶跃信号。我们可以看到,此时红线不能很快速地跟随黄色线,并且两条线段稳定时,红线跟黄线之间始终有个误差。这就表明 fI = 0.1 过小了,我们可以继续增加该数值看看效果。
取 fP = 0,fI = 0.9 时,响应曲线如下:

可以看到,这时红线能够很及时地跟踪到黄线,但是出现了震荡。有没有办法能够消除震荡呢?
取 fP = 2.0,fI = 0.9 时,响应曲线如下:

这时,可以看到红线的震荡已经没有那么明显了,控制效果明显好了很多。这表明 fP = 2.0 是能够抑制震荡的,我们可以继续增大该数值看看效果。
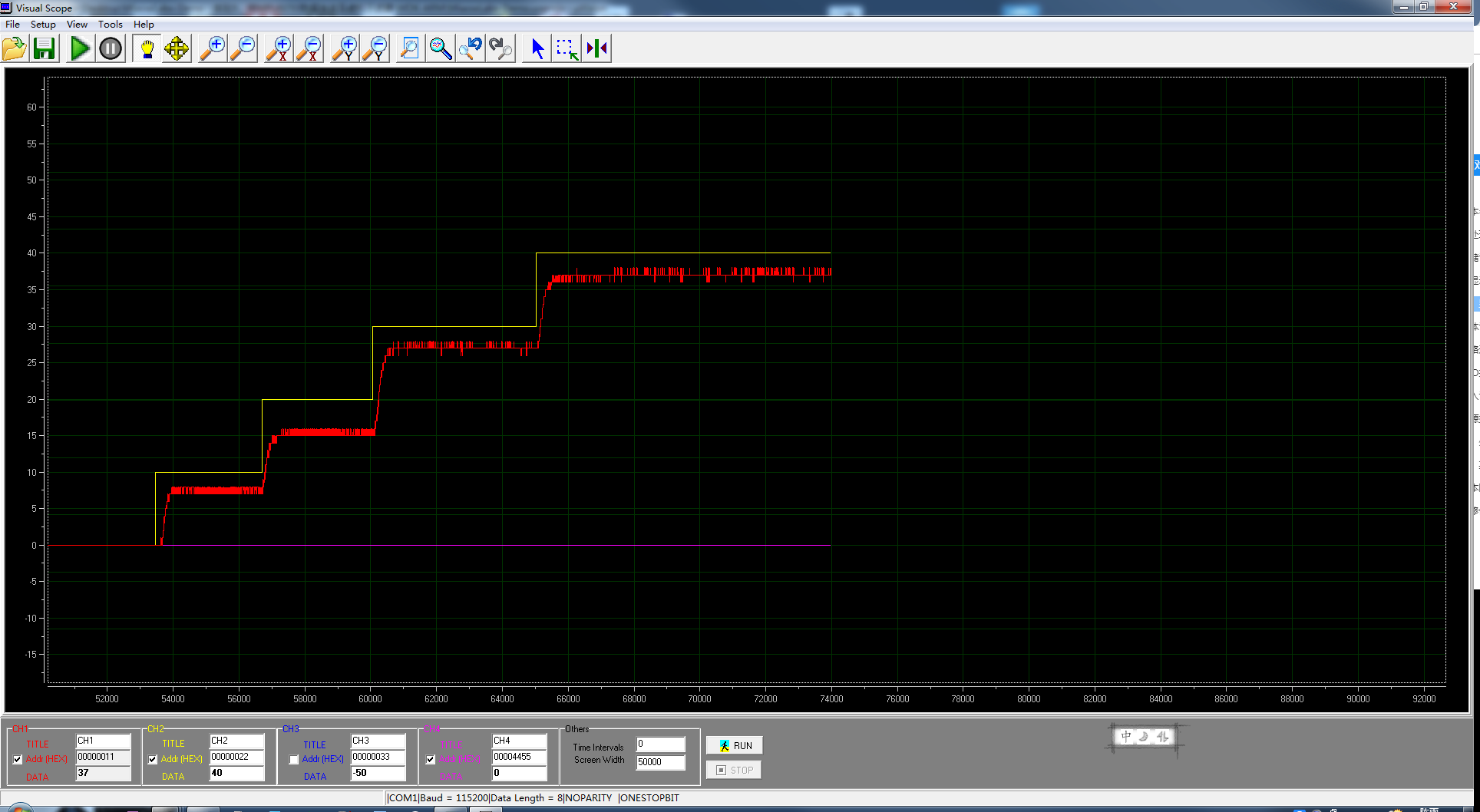
取 fP = 10.0,fI = 0.9 时,响应曲线如下:

这时,可以看到红线能够及时地跟踪到黄线,并且没有发生震荡,很接近我们想要的效果。
当 fP = 10.0,fI = 0.9 时,电机速度闭环内环控制已经取得了不错的效果,但是这不是最好的效果,还可以在这组参数附近进行微调,但需要投入一定的时间。由于篇幅有限,这里不再微调,如果读者感兴趣,可以自行进行微调,以获得更好的控制效果。