直立平衡角度环PID控制
本小节主要教你编写角度环 PID 控制相关的代码和对 PID 参数进行整定。
补充相关初始化代码
为了降低学习难度,便于萌新们学习,在编码器和驱动电机的例程中,我们以一个电机为例,进行了具体的操作设置。但是,两轮自平衡小车是有两个电机的,所以,在进行直立平衡角度环 PID 控制之前,我们需要先对另一个电机相关的还没初始化的相关引脚进行初始化。
在《PWM与TB6612FNG驱动电机》一节中,我们配置了一个电机的相关控制引脚(TIM3_CH2、PA3、PA4),在这里对另一个电机的相关控制引脚(TIM3_CH1、PB0、PB1)。
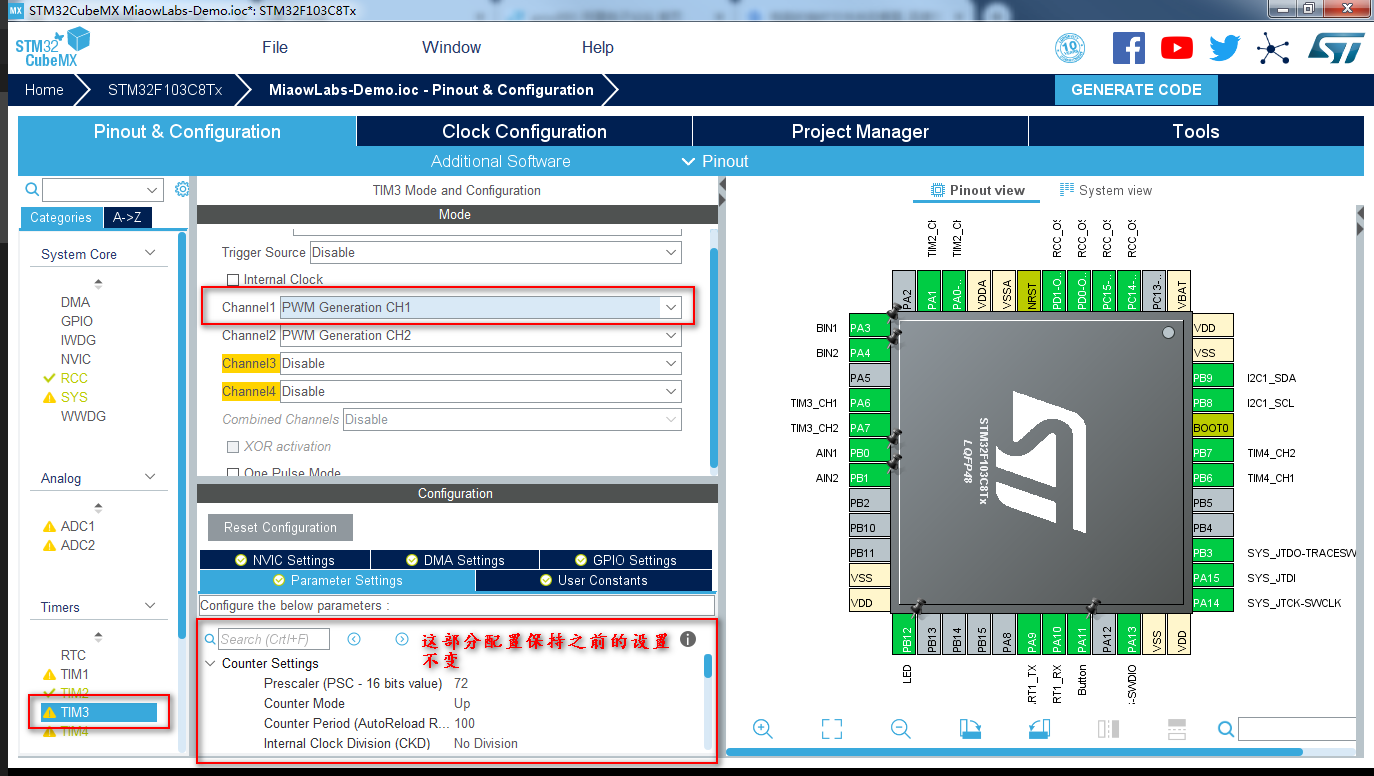
回到 STM32CubeMX 软件界面,在左侧 Pinout&Configuration 界面中的 Timers 下拉中点击 TIM3,然后在 TIM3 Mode and Configuration 的 Mode 中将 Channel1 选择为 PWM Generation CH1。因为我们之前配置 Channel2 的时候,已经对参数设置选项卡做出了对应的修改,这时就不用再修改了。
回到 STM32CubeMX 软件界面,在右侧界面的芯片中分别点击 PB0、PB1,并将其配置为 GPIO_Output。在 System Core 下拉菜单中选择 GPIO,然后在左侧的 System Core 下拉菜单中选择 GPIO,然后在 GPIO Mode and Configuration 中对 PA3、PA4 引脚进行配置,GPIO output level 代表 GPIO 默认输出电平,在这里设置为低电平;GPIO mode 代表 GPIO 引脚模式,在这里设置为推挽输出;GPIO Pull-up/Pull-down 即 GPIO 上拉或下拉,在这里设置为既不上拉也不下拉;Maximum output speed 即 最大输出速度,在这里设置为低速;User Label 即用户标签,在这里将 PA0 改为 AIN1,PB1 改为 AIN2。

在《Timer编码器模式读取编码器》一节中,我们只配置 TIM4 为编码器模式,没有配置 TIM2。在这里对 TIM2 进行补充配置,其实很简单,跟之前配置 TIM4 一样的。
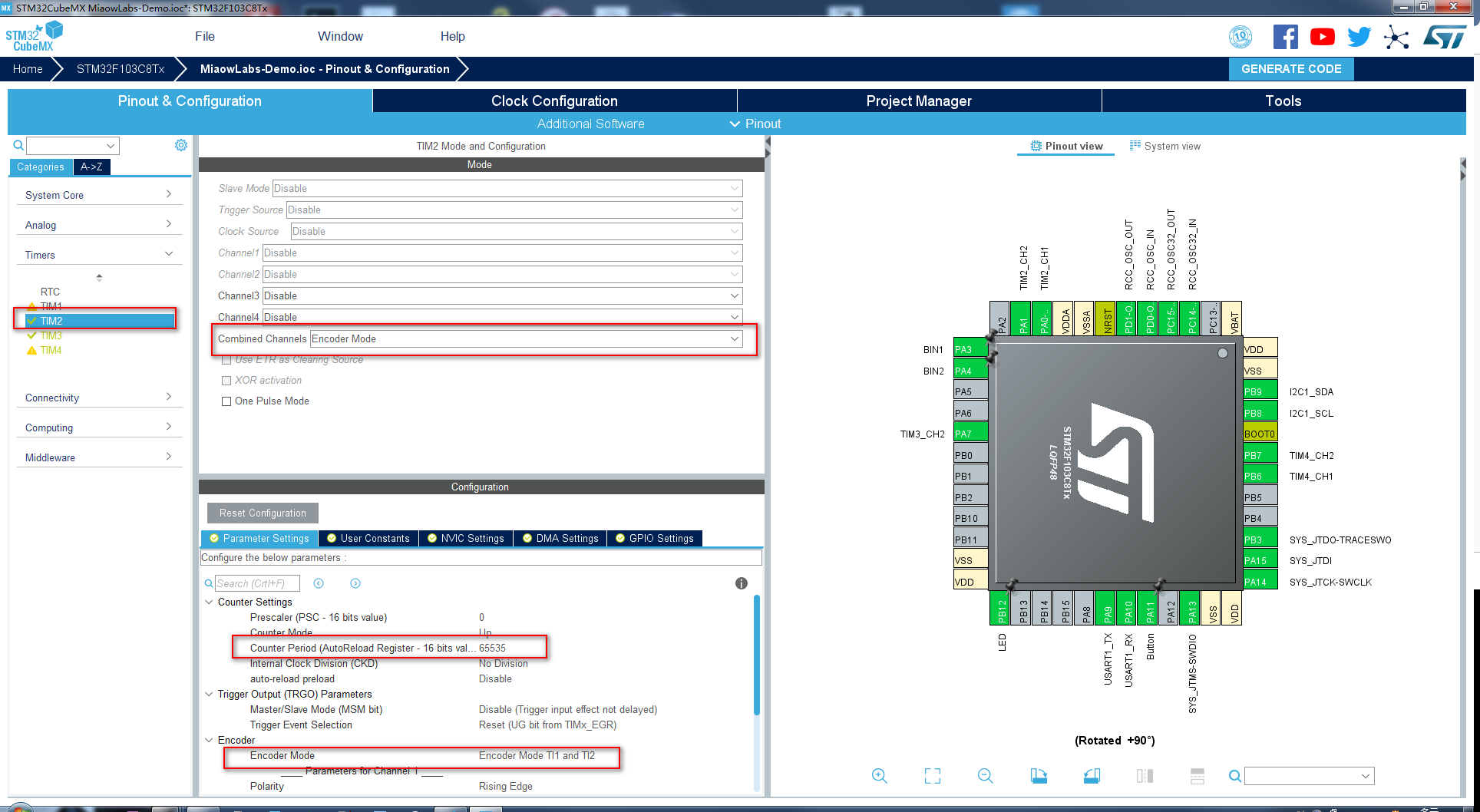
进入我们上一小节修改过的 MiaowLabs-Demo 文件夹,找到 MiaowLabs-Demo.ioc 工程文件,双击,打开工程。在左侧 Pinout&Configuration 界面中的 Timers 下拉中点击 TIM2,然后在 TIM2 Mode and Configuration 的 Mode 中将 Combined Channels 选择为 Encoder Mode,即编码器模式。
在 Configuration 中选择 Parameter Setting 选项卡,进行基本参数配置。其中,Counter Mode 默认为 Up,即向上计数。Counter Period 设置为 65535,即计数器周期,这是一个 16 位的自动加载寄存器,填写范围为 0~65535。Encoder Mode 设置为 Encoder Mode TI1 and TI2,即两个输入 TI1 和 TI2 都被用来作为增量编码器的接口。Polarity 默认为 Rising Edge,即为捕获上升沿。其他参数默认即可。
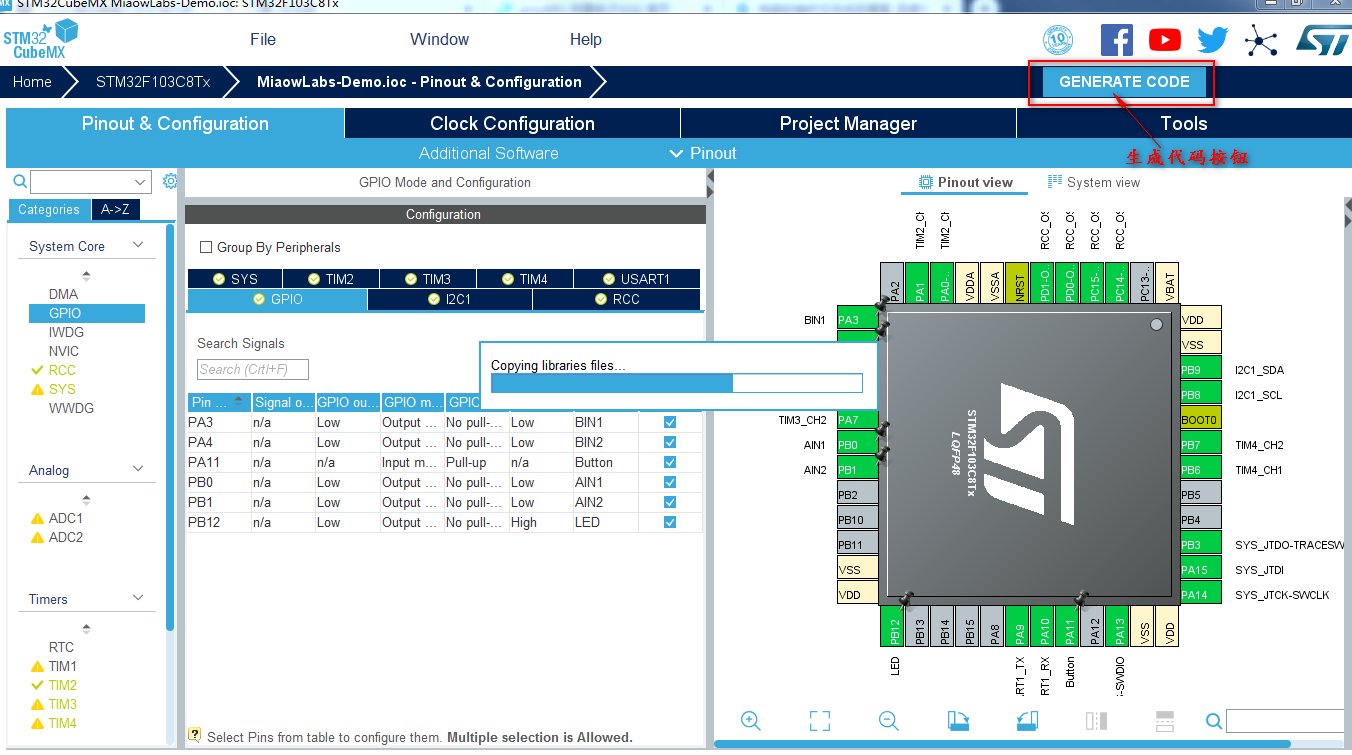
点击 GENERATE CODE,重新生成代码。
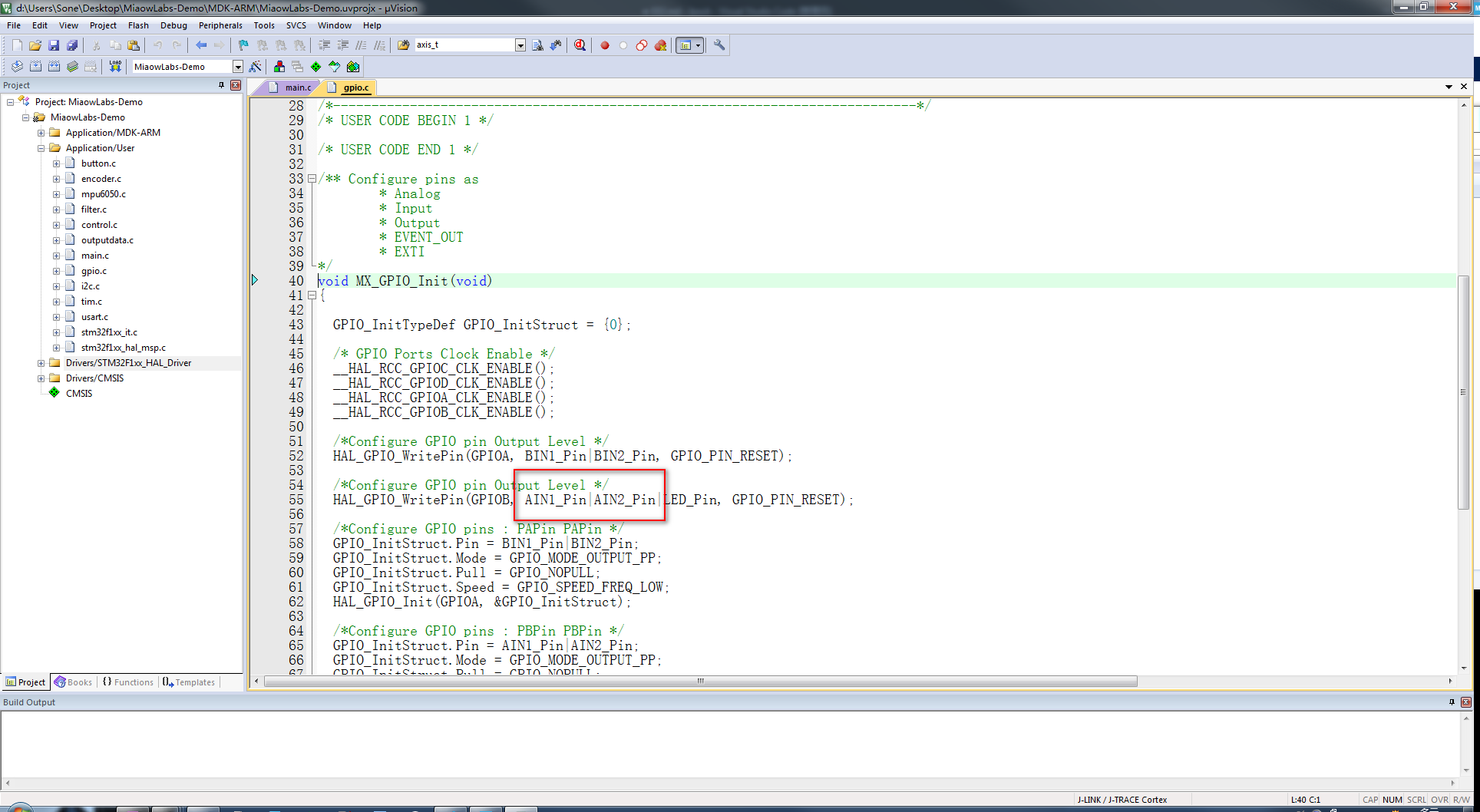
打开 MDK-ARM 工程,左侧 Application/User main.c 源文件的 main 函数里的 GPIO 初始化函数: MX_GPIO_Init();,可以看到里面新增了我们刚才添加的 AIN1 和 AIN2 引脚。
点开 TIM3 初始化函数 MX_TIM3_Init();,能看到里面 Channel1 和 Channel2 的相关代码都已经有了。
至此,STM32CubeMX 软件部分的初始化配置就完成了,接下来,要修改我们之前定义的算法代码。
角度环PID控制
在 control.c 文件中里敲下以下代码:
#include "control.h"
#include "filter.h"
#include "mpu6050.h"
#include "math.h"
#include "outputdata.h"
#include "tim.h"
#include "main.h"
#define MOTOR_OUT_DEAD_VAL 0 //死区值
#define MOTOR_OUT_MAX 100 //占空比正最大值
#define MOTOR_OUT_MIN (-100) //占空比负最大值
#define CAR_ANGLE_SET 0//目标角度
#define CAR_ANGLE_SPEED_SET 0//目标角速度
short x_nAcc,y_nAcc,z_nAcc;//加速度x轴、y轴、z轴数据
short x_nGyro,y_nGyro,z_nGyro;//陀螺仪x轴、y轴、z轴数据
float x_fAcc,y_fAcc,z_fAcc;//用于存储加速度x轴、y轴、z轴数据运算后的数据
float g_fAccAngle;//加速度传感器经过atan2()解算得到的角度
float g_fGyroAngleSpeed;//陀螺仪角速度
float g_fCarAngle;//小车倾角
float dt = 0.005;//互补滤波器控制周期
unsigned int g_nMainEventCount;//主事件计数,用在中断中
unsigned int g_nGetPulseCount;//捕获脉冲计数,用在中断中
unsigned int g_nLeftMotorPulse,g_nRightMotorPulse;//全局变量,保存左电机脉冲数值
int nPwmBais;//PWM增量
int nLeftMotorPwm,nRightMotorPwm;//左电机PWM输出总量,左电机PWM输出总量
int nLeftMotorErrorPrev,nRightMotorErrorPrev;//左电机上一次偏差,右电机上一次偏差
float g_fLeftMotorOut,g_fRightMotorOut;
float g_fAngleControlOut;
void GetMpuData(void)//读取MPU-6050数据
{
MPU_Get_Accelerometer(&x_nAcc,&y_nAcc,&z_nAcc);//获取MPU6050加速度数据
MPU_Get_Gyroscope(&x_nGyro,&y_nGyro,&z_nGyro); //获取MPU6050陀螺仪数据
}
void AngleCalculate(void)//角度计算
{
//-------加速度数据处理--------------------------
//量程为±2g时,灵敏度:16384 LSB/g
x_fAcc = x_nAcc / 16384.0;
y_fAcc = y_nAcc / 16384.0;
z_fAcc = z_nAcc / 16384.0;
g_fAccAngle = atan2(y_fAcc,z_fAcc) * 180.0 / 3.14;
//-------陀螺仪数据处理-------------------------
//范围为2000deg/s时,换算关系:16.4 LSB/(deg/s)
g_fGyroAngleSpeed = x_nGyro / 16.4; //计算角速度值
//-------互补滤波---------------
g_fCarAngle = ComplementaryFilter(g_fAccAngle, g_fGyroAngleSpeed, dt);
OutData[0]=g_fAccAngle;//发送加速度初步计算的角度
OutData[1]=g_fGyroAngleSpeed;//发送陀螺仪角速度
OutData[2]=g_fCarAngle;//发送数据融合得到的角度
}
void GetMotorPulse(void)//读取电机脉冲
{
g_nLeftMotorPulse = (short)(__HAL_TIM_GET_COUNTER(&htim4));//获取计数器值
__HAL_TIM_SET_COUNTER(&htim4,0);//TIM4计数器清零
g_nRightMotorPulse = (short)(__HAL_TIM_GET_COUNTER(&htim2));//获取计数器值
__HAL_TIM_SET_COUNTER(&htim2,0);//TIM2计数器清零
}
int SpeedInnerControl(int nPulse, int nTarget, int nPwm, int nErrorPrev)//速度内环控制
{
int nError;//偏差
float fP = 10.0, fI = 0.9;//这里只用到PI,参数由电机的种类和负载决定
nError = nPulse - nTarget;//偏差 = 目标速度 - 实际速度
nPwmBais = fP * (nError - nErrorPrev) + fI * nError;//增量式PI控制器
nErrorPrev = nError;//保存上一次偏差
nPwm += nPwmBais;//增量输出
if(nPwm > 100) nPwm = 100;//输出饱和处理,限制上限,防止超出PWM量程
if(nPwm <-100) nPwm =-100;
//OutData[0]=(float)nPulse;//速度实际值
//OutData[1]=(float)nTarget ;//速度目标值
//OutData[2]=(float)nPwm;//PWM输出值
return nPwm;//返回输出值
}
void SetMotorVoltageAndDirection(int nLeftMotorPwm,int nRightMotorPwm)//设置电机电压和方向
{
if(nRightMotorPwm < 0)//反转
{
HAL_GPIO_WritePin(AIN1_GPIO_Port, AIN1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(AIN2_GPIO_Port, AIN2_Pin, GPIO_PIN_RESET);
nRightMotorPwm = (-nRightMotorPwm);//如果计算值是负值,负值只是表示反转,先转负为正,因为PWM寄存器只能是正值
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, nRightMotorPwm);
}else//正转
{
HAL_GPIO_WritePin(AIN1_GPIO_Port, AIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(AIN2_GPIO_Port, AIN2_Pin, GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, nRightMotorPwm );
}
if(nLeftMotorPwm < 0)//反转
{
HAL_GPIO_WritePin(BIN1_GPIO_Port, BIN1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(BIN2_GPIO_Port, BIN2_Pin, GPIO_PIN_RESET);
nLeftMotorPwm = (-nLeftMotorPwm);//如果计算值是负值,负值只是表示反转,先转负为正,因为PWM寄存器只能是正值
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, nLeftMotorPwm);
}else//正转
{
HAL_GPIO_WritePin(BIN1_GPIO_Port, BIN1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(BIN2_GPIO_Port, BIN2_Pin, GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, nLeftMotorPwm);
}
}
void MotorOutput(void)//电机输出函数,将直立控制、速度控制、方向控制的输出量进行叠加,并加入死区常量,对输出饱和作出处理。
{
g_fLeftMotorOut = g_fAngleControlOut;//这里的电机输出等于角度环控制量,还没加入速度环外环等控制
g_fRightMotorOut = g_fAngleControlOut;
/*增加电机死区常数*/
if((int)g_fLeftMotorOut>0) g_fLeftMotorOut += MOTOR_OUT_DEAD_VAL;
else if((int)g_fLeftMotorOut<0) g_fLeftMotorOut -= MOTOR_OUT_DEAD_VAL;
if((int)g_fRightMotorOut>0) g_fRightMotorOut += MOTOR_OUT_DEAD_VAL;
else if((int)g_fRightMotorOut<0) g_fRightMotorOut -= MOTOR_OUT_DEAD_VAL;
/*输出饱和处理,防止超出PWM范围*/
if((int)g_fLeftMotorOut > MOTOR_OUT_MAX) g_fLeftMotorOut = MOTOR_OUT_MAX;
if((int)g_fLeftMotorOut < MOTOR_OUT_MIN) g_fLeftMotorOut = MOTOR_OUT_MIN;
if((int)g_fRightMotorOut > MOTOR_OUT_MAX) g_fRightMotorOut = MOTOR_OUT_MAX;
if((int)g_fRightMotorOut < MOTOR_OUT_MIN) g_fRightMotorOut = MOTOR_OUT_MIN;
SetMotorVoltageAndDirection((int)g_fLeftMotorOut,(int)g_fRightMotorOut);
}
void AngleControl(void) //角度环控制函数
{
float fP = 5.0;//角度环P参数
float fD = 0.2;//角度环D参数
g_fAngleControlOut = (CAR_ANGLE_SET - g_fCarAngle) * fP + (CAR_ANGLE_SPEED_SET - g_fGyroAngleSpeed) * fD;//PD控制器
}
因为角度环 PID 控制已经涉及到使用两轮自平衡小车的两个电机,所以在本次实验的大部分函数跟上一个实验不太一样,需要改成适用于两个电机。
在 control.h 中声明函数和变量,敲入以下代码:
#ifndef __CONTROL_H
#define __CONTROL_H
#include "filter.h"
extern unsigned int g_nMainEventCount;//主事件计数,用在中断中
extern unsigned int g_nGetPulseCount;//捕获脉冲计数,用在中断中
extern float g_fCarAngle;
extern unsigned int g_nLeftMotorPulse;
extern int g_nSpeedTarget;
extern int g_nLeftMotorOutput;
void GetMpuData(void);
void AngleCalculate(void);
void GetMotorPulse(void);
int SpeedInnerControl(int nPulse, int nTarget, int nPwm, int nErrorPrev);
void SetMotorVoltageAndDirection(int nLeftMotorPwm,int nRightMotorPwm);
void MotorOutput(void);
void AngleControl(void);
#endif
在 stm32f1xx_it.c 中的 SysTick 中断服务函数中,即滴答中断服务函数中,敲入以下代码:
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
g_nMainEventCount++;//每进一次中断,主事件函数自动加1
if(g_nMainEventCount>=5)//SysTick是1ms一次,这里判断语句大于5就是5ms运行一次
{
g_nMainEventCount=0;//主事件循环每5ms循环一次,这里清零,重新计时。
GetMotorPulse();//每5ms捕获一次脉冲
}else if(g_nMainEventCount==1){//这1ms时间片段获取数据和角度计算
GetMpuData();//获取MPU-6050数据
AngleCalculate(); //进行角度计算
}else if(g_nMainEventCount==2){
AngleControl(); //这1ms时间片段进行角度控制
}else if(g_nMainEventCount==3){
//这1ms时间片段暂时啥都不干
}else if(g_nMainEventCount==4){
MotorOutput(); //电机输出函数,每5ms执行一次
}
ButtonScan();
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
/* USER CODE END SysTick_IRQn 1 */
}
上个实验中,我说过 SysTick 定时器在 STM32CubeMX 中被用于 HAL 库的延时,默认是每 1ms 中断一次。我们想要每 5ms 进行完一次全部控制,我们可以定义一个 5ms 的定时中断,比如使用 Timer1(定时器1)。这是可取的方法。但由于在这里,Timer2 和 Timer4 已经配置成编码器模式,Timer3 已经配置成 PWM 输出模式,只剩下 Timer1 和 SysTick 定时器可以用了。我们后续还想继续扩展,比如扩展超声波避障,那么还需要用到定时器,得预留一路定时器备用,于是这里,我们决定预留 Timer1,使用 SysTick 定时器。 可是,偏偏 SysTick 定时器又是 1ms 就中断一次,我们可不想对其进行改动,比如设置成 5ms 中断一次,一旦改动了延时函数啥得又得跟着改了,多麻烦?有没有省心一点的办法?肯定有啦,聪明的你可能也会想到,只要将本来 5ms 内要运行的代码,分成 5 次,每次在 1ms 内运行完也是一样的效果。我们利用一个计数变量 g_nMainEventCount,然后进行计数,将代码分割好,分别放在每个 1ms 内执行,这样就大功告成啦。我们也正是这样干了,取得很好的执行效果。
另外,捕获脉冲函数 GetMotorPulse() 是 5ms 执行一次,因为如果执行得太快,比如 1ms 执行一次,能捕获到的脉冲数比较少,这样误差会比较大,所以这个执行时间要适当。
在 main.c 源文件中加入以下初始化代码:
/* USER CODE BEGIN 2 */
if(!MPU_Init())//如果MPU6050初始化成功,返回0,!0则为1
{
printf("MPU-6050 Init Successfully");//成功了则打印 MPU-6050 Init Successfully
}
HAL_TIM_Encoder_Start(&htim4, TIM_CHANNEL_ALL);//开启TIM4的编码器接口模式
HAL_TIM_Encoder_Start(&htim2, TIM_CHANNEL_ALL);//开启TIM2的编码器接口模式
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_1);//开启TIM3_CH1的PWM输出
HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2);//开启TIM3_CH2的PWM输出
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
//printf("小车角度 = %f",g_fCarAngle);
//HAL_Delay(500);//延时0.5s,防止打印发送数据太快
//HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
if(g_iButtonState == 1)
{
//g_nSpeedTarget +=10;
HAL_GPIO_TogglePin(LED_GPIO_Port,LED_Pin);
HAL_Delay(10);
//OutPut_Data();//调用虚拟示波器的发送函数
}
//OutPut_Data();//调用虚拟示波器的发送函数
}
主要就是开启定时器的编码器接口模式和 PWM 输出,STM32CubeMX 软件只是负责配置和生成相关底层代码,但是要我们开启才能使用。并且,在主循环中,把一些无关的代码,注释掉,只保留一个按键控制 LED 亮灭功能。
到这里,角度环 PID 控制的框架已经搭建好了。接下来,就是对 PID 参数进行调试的事情了。PID 参数一般都是先调好内环再调外环。速度闭环内环作为内环,是直接对接电机的一环,其 PID 参数在上一个实验已经取得一组不错的参数,我们可以直接使用。本实验最重要的,是对角度环 PID 参数进行调试,要取得一组良好效果的参数。
让我们看看角度环控制函数 AngleControl() :
void AngleControl(void) //角度环控制函数
{
float fP = 5.0;//角度环P参数
float fD = 0.2;//角度环D参数
g_fAngleControlOut = (CAR_ANGLE_SET - g_fCarAngle) * fP + (CAR_ANGLE_SPEED_SET - g_fGyroAngleSpeed) * fD;//PD控制器
}
先简单说明下角度环控制函数AgnleControl()里面用到的变量:
- g_fCarAngle:小车角度;
- g_fGyroAngleSpeed:小车角速度,其实就是陀螺仪数值;
- CAR_ANGLE_SET:小车期望角度值,也是机械中值,宏定义,在里面可以看到设定为 0,因为我们的小车的重心分布在小车的轮轴之上,而且期望小车保持直立,随时保持为角度为 0 的状态。如果小车的重心不是在车轴上,而是偏向一边,那么要减去个偏差的值。 *CAR_ANGLE_SPEED_SET:小车期角速度值,宏定义,在这里可以看到设定为0,因为我们期望小车保持直立,随时保持为角速度为 0 的状态。
PD 控制器比较简洁明了,就一句话,我们通过 PD 控制器计算直立控制 PWM。
需要说明的是,在两轮自平衡小车的直立平衡控制环节中,选择 PD 控制而非 PID 控制的原因在于:
两轮自平衡小车的姿态检测信号中不可避免地存在噪声信号,这些噪声信号经过积分I环节会随着时间不断地累积,从而导致积分器失去消除静差的调节功能并产生控制误差;
两轮自平衡小车的轮胎与地面的摩擦会产生阻尼作用,这种阻尼可以克服小车姿态倾角静差的持续增加。
确定 fP 值的极性(令 fD=0)
首先我们估计 fP 的取值范围。我们的 PWM 量程设置的为 0~100,0 代表占空比 0%,100 代表占空比 100%。假如我们设定 fP 值为 25,那么两轮自平衡小车在 ±4° 的时候就会输出 100% 占空比,即电机全力满转。根据我们的感性认识,这显然太大了,那我们就可以估计 fP 值在 0~25 之间,首先大概我们给一个值 fP=-5,我们可以观察到,小车往哪边倒,电机会往另一边加速转动,导致小车倒下得更快,就是一个我们不愿看到的正反馈的效果,说明 fP 值的极性反了。接下来我们设定 fP=5,这个时候可以看到两轮自平衡小车有直立的趋势,虽然响应太慢,但是,我们可以确定 fP 值极性是正的。具体的数据接下来再仔细调试。
确定 fP 值的大小(令 fD=0,请结合本小节开头的直立控制函数理解)
确定参数的原则是:
fP 一直增加,直到出现大幅度的低频摆动。
- 设定 fP=1,这个时候我们可以看到,小车虽然有平衡的趋势,但是显然响应太慢了。
- 设定 fP=2,这个时候我们可以看到,小车虽然有平衡的趋势,而且响应有所加快,但是响应还是不足以让小车保持平衡。
- 设定 fP=5,这个时候我们可以看到,小车的响应明显加快,而且来回推动小车的时候,会有大幅度的低频摆动。说明这个时候 kp 值已经足够大了,需要增加微分控制削弱 P 控制,抑制低频摆动。
确定 kd 值的极性(令 kp=0)
我们得到的 MPU-6050 输出的陀螺仪的原始数据,通过观察数据,我们发现最大值不会超过 4 位数(正常应用在两轮自平衡小车上的时候),在经过单位换算(/16.4)后,数值不超过 61, 再根据100 代表占空比 100%,所以我们估算 kd 值应该在 0~1.6 之间,我们先设定 fD=-0.1,当我们拿起小车旋转的时候,车轮会反向转动,并没有能够实现跟随效果。这说明了 fD 的极性反了。接下来,我们设定 fD=0.1。这个时候我们可以看到,当我们旋转小车的时候,车轮会同向以相同的速度跟随转动,这说明我们实现了角速度闭环,至此,我们可以确定 fD 的极性是正的。
确定 fD 值的大小(令 fP=5.0,请结合本小节开头的直立控制函数理解)
确定参数的原则是: fD 一直增加,直到出现高频抖动。设定 fD=0.1,这个时候我们可以看到,低频大幅度频抖动已经基本消除。设定 fD=0.2,这个时候我们可以看到,整体性能已经非常棒。设定 fD=0.3,这个时候我们可以看到,小车开始出现高频剧烈抖动。
至此,我们可以确定得到 fP=5,fD=0.3 是 P、D 参数的临界值。然后我们进行最关键的一步,在临界值的附近进行参数微调(一般取值比临界值小)。这个时候我们可以看到,小车运行非常平稳,但是依然无法保持长时间的直立,直立很短一段时间后会往一个方向加速倒下。这个等我们下面加上速度环才能得到更好的性能。只有直立环是很难让小车达到很好的直立效果的。 至此,直立调试部分就告一段落了。